2020-1012-05
ライフサイエンス
掲載日:2020/10/27
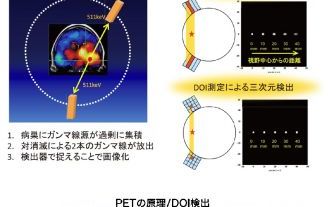
高感度DOI-PET検出器
片岡 淳 教授 (理工学術院 先進理工学部 応用物理学科)
◆ 画像診断用PET装置の解像度向上◆ ガンマ線の吸収位置「3次元」計測 ◆ 磁場耐性の新しい半導体光センサー
1334
環境
社会基盤
掲載日:2014/06/19
 特許第5991519号
特許第5991519号
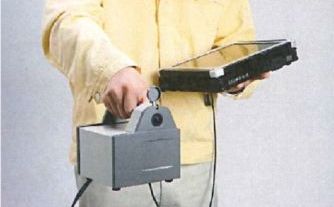
高感度コンプトンカメラ
片岡 淳 教授 (理工学術院 先進理工学部 応用物理学科)
高感度で容易に携帯可能なガンマ線撮影用のコンプトンカメラです。
2013-1021-01
ライフサイエンス
掲載日:2013/10/25
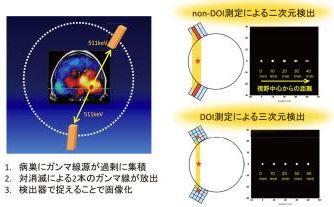
高感度DOI-PET検出器
片岡 淳 教授 (理工学術院 先進理工学部 応用物理学科)
・画像診断用PET装置の解像度向上・ガンマ線の吸収位置「3次元」計測 ・磁場耐性の新しい半導体光センサー
2012-0321-01
環境
掲載日:2012/03/21
ナノ流体を作動液とするマイクロヒートパイプ
勝田 正文 教授 (理工学術院 創造理工学部) (当時)
銀のナノ粒子を含む作動液をマイクロヒートパイプに適用することで伝熱性能が向上する。
2013-0130-09
ライフサイエンス
掲載日:2013/01/30
腰痛を中心とした障害の病態解明と予防方法(運動療法)提唱
金岡 恒治 教授 (スポーツ科学学術院 スポーツ科学部)
腰部をはじめとした脊椎とその隣接部位(股関節・鼠径部・肩甲帯)の受傷メカニズムの解明、診断・治療・リハビリ・予防に関わる知見。 主な競技対象は水泳競技(競泳、水球、飛び込み、シンクロ等)。
2013-0130-11
ライフサイエンス
掲載日:2013/01/30
スポーツスキルの解析
彼末 一之 教授 (スポーツ科学学術院 スポーツ科学部) (当時)
バッティングやピッチングなどにおいて、フルボディモーションキャプチャやフォースプレート等を用いた身体的パフォーマンス、バットスイングやボール回転、手指運動や視覚認知運動の精密測定など多様な解析手法から、軌跡の再現性等に着目したスキル評価を行っている。
2013-0130-10
ライフサイエンス
掲載日:2013/01/30
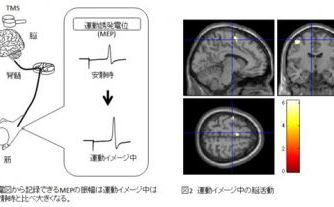
ボディ・イメージ研究に基づくコーチング技術、それらをいかしたスポーツ推進活動
彼末 一之 教授 (スポーツ科学学術院 スポーツ科学部) (当時)
実際の動きを伴わずに動作を想起する「ボディ・イメージ」中の脳活動や、自分の理想とする運動と実際の動きのギャップを計測・分析している。具体的には宙返りやけ上がり動作、皮膚感覚を伴う運動、道具を用いた動作などについて、非侵襲脳画像やバイオメカニクス測定を行っている。
2012-0313-03
エネルギー
掲載日:2012/03/13
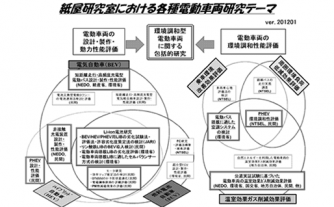
環境調和型電動車両の設計・製作・性能評価
紙屋 雄史 教授 (理工学術院 大学院環境・エネルギー研究科)
本研究室では、これまでに電動バスや各種電動車両を開発してきている。特に電動バスについては、実用化レベルまで開発が進んでいる。これらの知見を基に、様々な電気車両を対象とした設計・製作・性能評価を行うことが可能である。
2012-0619-04
環境
掲載日:2012/06/19
良質の地域土壌を用いた省エネ低コスト型の浄化材料開発
香村 一夫 教授 (理工学術院 創造理工学部) (当時)
環境浄化資材としての火山灰土壌の活用。
2012-0619-03
環境
掲載日:2012/06/19
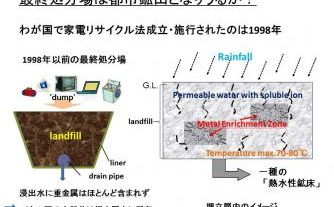
廃棄物最終処分場を対象とした、都市鉱山としての評価と探査・回収技術
香村 一夫 教授 (理工学術院 創造理工学部) (当時)
最終処分場の埋立物に含まれる金属の種類・量およびその鉱物的な賦存形態の解明と、回収有望な金属類を特定する技術。電気探査を利用して、金属類が濃集するゾーンの推定が可能である。
2645
社会基盤
掲載日:2023/07/06
特開2024-162293
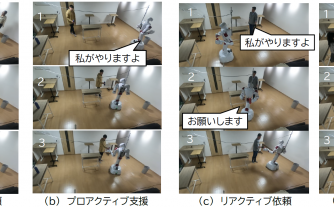
人間の動きを先読みできるロボット
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
このシーズは、ロボットが人間と協働して効率的に作業を行うための動作制御システムで、主な特徴は以下の通り。①人間の行動推定: 人間の位置情報や速度情報の時間的変化を解析し、タスクに対する行動を推定。②動作計画: 推定結果に基づき、ロボットの通常行動、依頼行動(ロボットがタスクを人間に...
2591
社会基盤
掲載日:2022/10/07
特開2024-029789
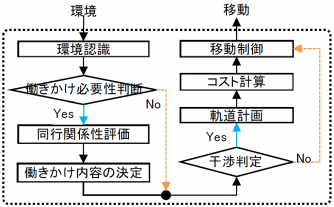
待機・迂回を含む後退的行動と接近・接触を含む前進的行動を併せ持つ自律移動ロボットの統合的軌道計画
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
2484
社会基盤
掲載日:2021/10/12
第7652389号
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
2485
社会基盤
掲載日:2021/09/06
第7677603号
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
2387
社会基盤
掲載日:2020/11/09
特許第7478393号
自律移動サービスロボットのための先導・追従行動計画システム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
本発明は、所定の目的地まで歩行者等の移動対象を先導し、また、荷物運搬や警護等のために移動対象に追従するタスクを行うための自律移動ロボット、並びに、その制御装置及び制御プログラムに関するものであり、混雑した空間内において想定される様々な不測の事態に対応しながら、サービスタスクを...
2363
社会基盤
掲載日:2020/08/21
特許第7525854号
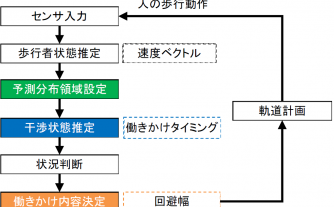
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
本発明は、人の速度ベクトルの測定誤差と将来的な速度ベクトルが現在の値を保持するかを示す保持可能性を考慮することで,軌道計画のロバスト化を目指した経路計画アルゴリズムを提案するものである。人の速度ベクトルの測定誤差と保持可能性を考慮した働きかけのタイミングの決定および人とロボッ...
2356
社会基盤
掲載日:2020/06/17
特許第7490193号
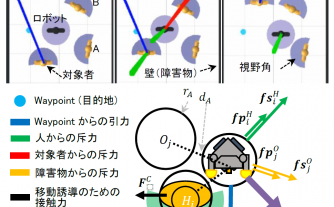
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
混雑環境下で自律移動するロボットの経路生成に適した周囲の人間等を含む移動予測モデルを構築し、ロボットの移動効率と周囲の人間等に与える負担を考慮しながら、最適な移動経路を生成することができるロボット、移動経路生成装置及びそのプログラム、並びに、移動予測装置を提供する。