複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
2356


- 研究者名
- 所属
- 専門分野
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- キーワード
- 特許名称
-
ロボット、移動経路生成装置及びそのプログラム、並びに、移動予測装置
- 特許番号
-
特許第7490193号

- 出願人
-
学校法人早稲田大学
- 出願国・地域
-
日本
シーズ概要
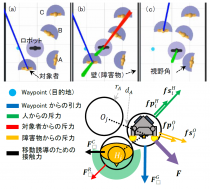
混雑環境下で自律移動するロボットの経路生成に適した周囲の人間等を含む移動予測モデルを構築し、ロボットの移動効率と周囲の人間等に与える負担を考慮しながら、最適な移動経路を生成することができるロボット、移動経路生成装置及びそのプログラム、並びに、移動予測装置を提供する。
効果
本発明によれば、混雑環境下で自律移動するロボットの経路生成に適した周囲の人間等を含む移動予測モデルに基づき、ロボットの移動効率と、周囲の人間等に与える物理的負担及び心理的負担からなる移動負荷とを総合的に判断することにより、ロボットと周囲の人間との相互作用をより正確に考慮した最適な移動経路を生成可能となる。ロボットの移動効率と、ロボットの移動に伴う人間の回避行動時の移動負荷とのバランスを取りながら、複数の候補経路から最適経路を選択することができる。
応用・展開
本発明に係るロボットとしては、自律移動ロボットに限定されるものではなく、自動車両、船舶、飛行体等、所定の空間内を自律的に移動可能な移動体の他に、所定範囲の空間内で移動するロボットアーム等のマニピュレータであってもよく、これら移動時における前記最適経路の生成を前述と同様の構成及び手順により行うことができる。
優位性
本発明における移動予測モデルは、ロボットが人間に接触しながら移動する際に、その接触力が考慮されるとともに、ロボットの周囲の人間等の認知範囲を考慮して斥力の作用状態を変化させることができるため、ロボットが周囲の人間に接触しながら混雑環境下を移動する場合に、ロボットや人間等の各エージェントについて、より適切な移動予測が可能になる。
提供目的
受託研究、共同研究、技術相談、知財ライセンス

共同発明者
円谷 優佑 , 金田 太智 , 菅野 重樹 教授 (理工学術院 創造理工学部 総合機械工学科)
関連論文
- 金田太智,亀﨑允啓,円谷優佑,平山三千昭,菅野重樹,“Inducible Social Force Modelに基づく混雑環境下での自律移動ロボットの被接近時回避手法の開発”,第38回日本ロボット学会学術講演会論文集(RSJ2020),paper no. 3A2-03,2020年9月.
- 金田太智,亀﨑允啓,円谷優佑,平山三千昭,菅野重樹,“Inducible Social Force Modelを用いた複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動”,日本機械学会ロボティクス・メカトロニクス講演会2020論文集(Robomech’20),paper no. 2A1-C01,2020年5月.
他のシーズ
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
-
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
-
ドライバーの状況認識推定・安全運転システム
-
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
-
自律移動サービスロボットのための先導・追従行動計画システム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
-
人間の動きを先読みできるロボット
掲載日:
2020/06/17