自律移動サービスロボットのための先導・追従行動計画システム
2387


- 研究者名
- 所属
- 専門分野
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- キーワード
- 特許名称
-
自律移動ロボット、並びに、その制御装置及び動作制御プログラム
- 特許番号
-
特許第7478393号
- 出願人
-
学校法人早稲田大学
- 出願国・地域
-
日本
シーズ概要
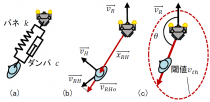
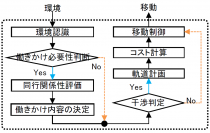
本発明は、所定の目的地まで歩行者等の移動対象を先導し、また、荷物運搬や警護等のために移動対象に追従するタスクを行うための自律移動ロボット、並びに、その制御装置及び制御プログラムに関するものであり、混雑した空間内において想定される様々な不測の事態に対応しながら、サービスタスクを継続させられることを特長とする行動計画手法である。
効果
先導行動や追従行動を伴うタスクの遂行時に、ロボットに対する移動対象の物理的な相対関係に加え、ロボットに対する移動対象の意識を総合して、ロボットに対する移動対象の動向を推定することができる。つまり、ロボットと移動対象との単なる相対距離のみならず、相対速度の大きさや方向を総合した同行関係性と、移動対象のロボットに対する意識に関する同行意思とも総合的に考慮しながら、将来的なタスクの継続性を事前に判断し、その状況に応じて様々なロボットの動作制御が行われる。
応用・展開
パーソナルモビリティ、動車両、船舶、飛行体等、所定の空間内を自律的に移動可能な移動体に対しても、一種の自律移動ロボットとして適用可能である。物理的な接触を伴う歩行介助などにも応用できる。また、群ロボットの制御等にも応用可能である。
優位性
同行関係性と同行意思の推定に基づき行動計画を行うことで、不測の事態が生じても、先導行動や追従行動を伴うタスクを継続して遂行できることが従来システムと比較した際の優位性となる。
提供目的
受託研究、共同研究、技術相談、知財ライセンス
共同発明者
斎藤 喬介 , 濱田 太郎 , 菅野 重樹
関連論文
- 濱田太郎,斎藤喬介,金田太智,平山三千昭,亀﨑允啓,菅野重樹,“自律移動ロボットのサービスタスク運用のための先導・追従行動計画フレームワークの提案”,第38回日本ロボット学会学術講演会論文集(RSJ2020),paper no. 3I1-03,2020年9月.
関連URL
他のシーズ
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
-
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
-
ドライバーの状況認識推定・安全運転システム
-
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
-
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
-
人間の動きを先読みできるロボット
掲載日:
2020/11/09