2387
社会基盤
掲載日:2020/11/09
特許第7478393号
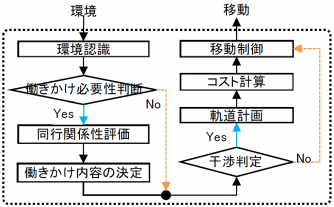
自律移動サービスロボットのための先導・追従行動計画システム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
本発明は、所定の目的地まで歩行者等の移動対象を先導し、また、荷物運搬や警護等のために移動対象に追従するタスクを行うための自律移動ロボット、並びに、その制御装置及び制御プログラムに関するものであり、混雑した空間内において想定される様々な不測の事態に対応しながら、サービスタスクを...
2363
社会基盤
掲載日:2020/08/21
 特許第7525854号
特許第7525854号
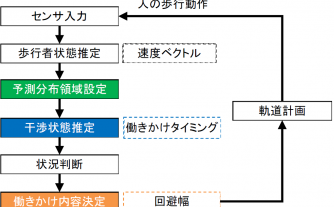
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
本発明は、人の速度ベクトルの測定誤差と将来的な速度ベクトルが現在の値を保持するかを示す保持可能性を考慮することで,軌道計画のロバスト化を目指した経路計画アルゴリズムを提案するものである。人の速度ベクトルの測定誤差と保持可能性を考慮した働きかけのタイミングの決定および人とロボッ...