ドライバーの状況認識推定・安全運転システム
2220


- 研究者名
- 所属
- 専門分野
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- キーワード
- 特許名称
-
状況認識推定システム及び運転支援システム
- 特許番号
-
特許第7432198号

- 出願人
-
学校法人早稲田大学
- 出願国・地域
-
日本
シーズ概要
本発明は、状況認識推定システム及び運転支援システムに係り、更に詳しくは、所定の対象者の周囲を相対移動する認識対象物について、その対象者が適切に認識しているか否かを推定する状況認識推定システム、及び当該状況認識推定システムを利用して、対象者による自動車等の移動体の運転支援を行う運転支援システムに関する。
効果
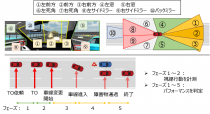
視線データにより、各時刻において、各視認エリアにおける認識対象物の存在状況と対象者における各視認エリアの視認状況とを対応させ、これにより、各時刻において各認識対象物を対象者が視認しているか否かを推定可能になる。また、本発明の状況認識推定システムを利用することにより、運転者の状況認識能力の客観的な評価が可能になり、当該評価内容を運転者にフィードバックすること等により、事故防止の観点での運転者の運転能力の向上に資することになる。
応用・展開
従来システムの多くは、自動から手動への切替時のテイクオーバーに特化していたが、本発明はレベル0or1の手動運転でも高度自動運転でも利用できる。また、本発明の枠組みは、Human Monitoringという一般的な利用応用(車以外でも)が可能である。
優位性
実際の運転時において、各運転タスクで運転者が不足している状況認識をリアルタイムで推定できるため、当該状況認識が不足している場合に、注意喚起等により運転者に再度の視認を促し、或いは、状況認識の低下による事故等を抑制するための機器やシステムに対して動作指令する等の各種サポートが可能になる。
提供目的
受託研究、共同研究、技術相談、知財ライセンス


共同発明者
林 弘明 , 岡 直樹 , マナワドゥ ウダーラ , 菅野 重樹 教授 (理工学術院 創造理工学部 総合機械工学科)
関連論文
- Hiroaki Hayashi, Naoki Oka, Mitsuhiro Kamezaki, and Shigeki Sugano, “Development of a Situational Awareness Estimation Model Considering Traffic Environment for Unscheduled Takeover Situations,” International Journal of Intelligent Transportation Systems Research (IJIT), vol. 19, no. 1, pp. 167-181, Oct. 20, 2020. https://doi.org/10.1007/s13177-020-00231-4
- 岡直樹,林弘昭,マナワドゥ ウダーラ,江馬敬明,亀﨑允啓,菅野重樹,“認知行動の基準モデルに基づくテイクオーバー時の状況認識不足推定手法の開発”,日本機械学会ロボティクス・メカトロニクス講演会2020論文集(Robomech’20),paper no. 1P2-C03,2020年5月27~30日.
関連URL
他のシーズ
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
-
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
-
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
-
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
-
自律移動サービスロボットのための先導・追従行動計画システム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
-
人間の動きを先読みできるロボット
掲載日:
2019/07/30