2591
社会基盤
掲載日:2022/10/07
待機・迂回を含む後退的行動と接近・接触を含む前進的行動を併せ持つ自律移動ロボットの統合的軌道計画
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
2484
社会基盤
掲載日:2021/10/12
特開2023- 32381
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
2485
社会基盤
掲載日:2021/09/06
 特開2023- 28681
特開2023- 28681
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
2387
社会基盤
掲載日:2020/11/09
特開2022-60801
自律移動サービスロボットのための先導・追従行動計画システム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
本発明は、所定の目的地まで歩行者等の移動対象を先導し、また、荷物運搬や警護等のために移動対象に追従するタスクを行うための自律移動ロボット、並びに、その制御装置及び制御プログラムに関するものであり、混雑した空間内において想定される様々な不測の事態に対応しながら、サービスタスクを...
2363
社会基盤
掲載日:2020/08/21
特開2022-13038
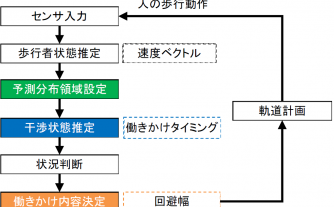
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
本発明は、人の速度ベクトルの測定誤差と将来的な速度ベクトルが現在の値を保持するかを示す保持可能性を考慮することで,軌道計画のロバスト化を目指した経路計画アルゴリズムを提案するものである。人の速度ベクトルの測定誤差と保持可能性を考慮した働きかけのタイミングの決定および人とロボッ...
2356
社会基盤
掲載日:2020/06/17
特開2021-189508
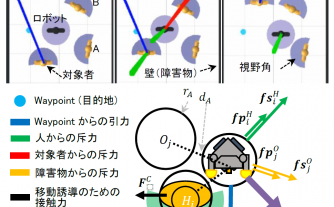
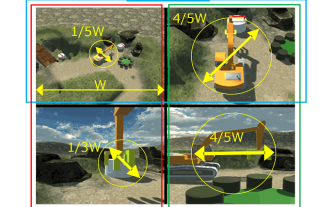
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
混雑環境下で自律移動するロボットの経路生成に適した周囲の人間等を含む移動予測モデルを構築し、ロボットの移動効率と周囲の人間等に与える負担を考慮しながら、最適な移動経路を生成することができるロボット、移動経路生成装置及びそのプログラム、並びに、移動予測装置を提供する。
2062
ライフサイエンス
掲載日:2020/04/14
特開2020-31538
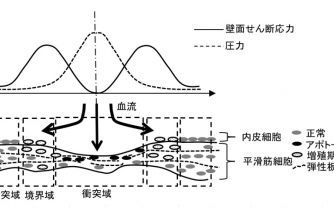
生体外で創る血管病モデルと薬剤スクリーニングへの応用
八木 高伸 主任研究員 (理工学術院 理工学術院総合研究所)
患者の血管病の病態に近似し、簡便かつ短期間で作製 可能で、血管組織が正常から病態へと経時間的に変化す るプロセスを解明することが可能な、ex vivoの疾患モ デルの作製方法を確立し、血管病の予防又は治療のため の薬剤のスクリーニングに利用可能な疾患モデルを提供 することを課題とする。
2220
社会基盤
掲載日:2019/07/30
特開2020-197952
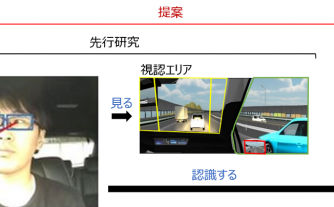
ドライバーの状況認識推定・安全運転システム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
本発明は、状況認識推定システム及び運転支援システムに係り、更に詳しくは、所定の対象者の周囲を相対移動する認識対象物について、その対象者が適切に認識しているか否かを推定する状況認識推定システム、及び当該状況認識推定システムを利用して、対象者による自動車等の移動体の運転支援を行う...
2182
社会基盤
掲載日:2019/07/05
特許第7203379号
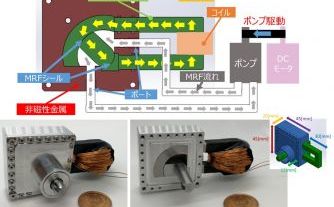
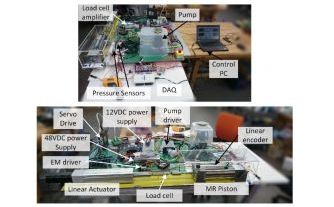
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
人の代替労働力・サポート手段として活躍が期待されるロボットのアクチュエータには、高出力性や高応答性、機構的高柔軟性、堅牢性、良制御性、高エネルギー効率といった諸特性を兼ね備えることが求められている。本シーズは、特に,高出力性と逆可動性という特長を有する磁気粘性流体(MR流体)...

2018-1123-03
ライフサイエンス
掲載日:2018/11/23
脳動脈瘤の再現モデル装置
八木 高伸 主任研究員 (理工学術院 理工学術院総合研究所)
共同研究者:坂口 勝久 非常勤講師
◆ 脳動脈瘤の病態を体外で再現するex vivo技術の確立 ◆ 血流負荷を作用させることにより正常から病態への過程を再現◆ 血流異常による血管の退行変性を経時的に再現・分析
1985
社会基盤
掲載日:2018/01/23
7023492
ドローンを使った移動体操作のための映像提示と自動制御システム
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
遠隔操作ロボットを多種多様な作業環境に適用するためには,作業環境中の任意の位置,角度からの映像を提示することが効果的であることから,マルチ飛行カメラを用いた「状況に応じて適応的に調整を行う映像提示システム」を提案する.1つの画面に対して一貫した映像を提示する「連続性」と映像シ...
1986
社会基盤
掲載日:2018/01/15
7036399
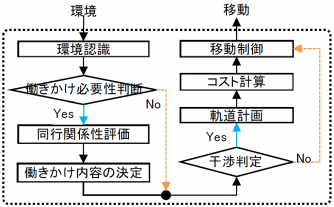
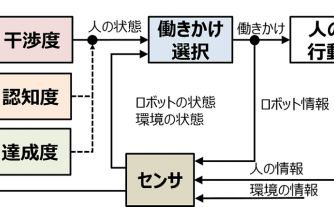
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
移動体と移動障害物との協調移動のために,「ロボットから人への意図伝達度」に着目した人状態推定手法を開発し,双方の動作結果を踏まえた連続的な働きかけ手法を提案する.ロボットのすれ違い幅から働きかけの必要性を判定する「干渉度」,人のロボットに対する認知の有無を判断する「認知度」...
1616
社会基盤
掲載日:2017/02/20
特許第6493962号
MR流体を用いたバックドライバブルアクチュエータ
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
高応答・高出力・安全性が求められる次世代のロボットシステムには、予期しない外力の付与に対して迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。 本シーズは、応答時間の短縮化を図るとともに、比較的簡易な構成で柔軟性を発揮させることができるバックドライバブルアク...
1872
社会基盤
掲載日:2016/12/06
特許第6863562号
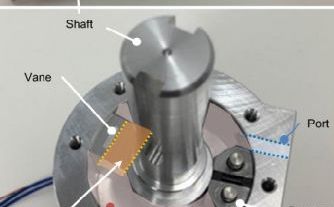
MR流体を用いた逆可動性を有するロータリアクチュエータ
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
高応答・高出力・安全性が求められる次世代のロボットシステムには,予期しない外力の付与に対しても迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。本シーズは,応答時間の短縮化を図るとともに,比較的簡易な構成で本質的な柔軟性を発揮させることができる逆可能型のロー...
2016-0614-01
ものづくり技術
掲載日:2016/07/14
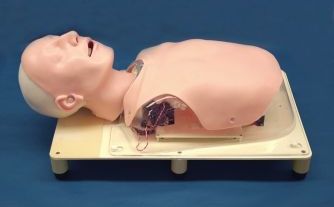
医療手技訓練用ヒューマノイド
石井 裕之 教授 (理工学術院 理工学術院総合研究所)
共同研究者:高西 淳夫 教授
医師など医療従事者の訓練に用いる患者シミュレータに関する技術.アクチュエータによって1台のシミュレータでさまざまな患者を再現することや,センサによって手技を計測し評価することが可能.

2016-0614-02
ライフサイエンス
掲載日:2016/07/14
顎顔面マッサージロボット
石井 裕之 教授 (理工学術院 理工学術院総合研究所)
共同研究者:高西 淳夫 教授 、勝又 明敏 教授
顎関節症等の疾患に有効な顎顔面マッサージを行うロボットの設計ならびに制御に関する技術.この技術を用いることで,熟練した施術者が行うような力強さとしなやかさを兼ね備えたマッサージが可能.
2012-1019-01
ナノ・材料
掲載日:2012/10/19
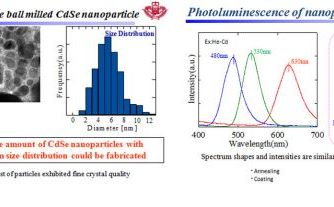
ナノ粒子発光体フィルムの作製および太陽電池への適用など
小林 正和 教授 (理工学術院 理工学術院総合研究所)
本研究室では、 数nmのナノ粒子発光体をボールミル粉砕方法で製造した。 ナノ粒子発光体を使用して、全波長領域で90%以上の透過率を有する透明薄膜を作製した。
太陽電池上に以下の条件を満たす赤色蛍光体透明薄膜を作製する。
①短波長光を長波長光に波長変換
②長波長光はそのまま透過(→ナノ粒子...