ドローンを使った移動体操作のための映像提示と自動制御システム
1985


- 研究者名
- 所属
- 専門分野
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- キーワード
- 特許名称
-
移動体の追従画像提示システム
- 特許番号
-
7023492

- 出願人
-
学校法人早稲田大学
- 出願国・地域
-
日本
シーズ概要
遠隔操作ロボットを多種多様な作業環境に適用するためには,作業環境中の任意の位置,角度からの映像を提示することが効果的であることから,マルチ飛行カメラを用いた「状況に応じて適応的に調整を行う映像提示システム」を提案する.1つの画面に対して一貫した映像を提示する「連続性」と映像システム全体で環境理解性を最大化する映像間の「相補性」により,必要最低限のカメラ資源で最大限の遠隔操作性を実現する.
効果
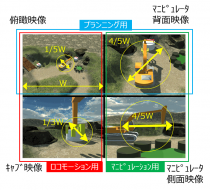
多種多様な作業環境に適用するためには,作業環境中のあらゆる位置,角度からの映像を提示する必要があるため,固定カメラを用いて,その設置位置や設置数を最適化するアプローチでは,限界がある.そこで,カメラの設置位置という物理的な制約をなくすことのできる飛行カメラを複数台利用することで解決を試みる.効率的な作業には効果的な環境把握が必要となる.1つの映像でカバーできない環境情報を複数のカメラ映像を用いることになるが,これらの映像をオペレータが効果的・直感的に頭の中でつなぎ合わせ,認知のための地図を用意に再現できる必要がある.これを満たす映像群を相補性が高いと定義する.また,ロボットの操作時に移動方向やマニピュレータ操作で戸惑わないことが重要となる.そのためには,画面上での映像の切替わりおよび心的回転を少なくすることが大切である.障害物やオクルージョンを回避する際も映像の一貫した映像提示を行う.これを映像の連続性が高いと定義する.連続性向上には,頻繁な画角変化や極端な撮像方向の変化を避けることが重要と考え,カメラロールは撮像点追従のみで,1つの画面に対して1つのカメラ映像を投影する.さらに,相補性向上には,心的回転の方向に整合性を有し,環境把握と作業遂行において必要十分な映像群が必要と考え,自己視点再現のためのキャブ映像,環境把握用俯瞰映像,機体と手先の奥行きおよび水平位置把握用映像の4映像を案出した.
応用・展開
災害現場や無人化施工だけでなく,工事現場の監視やインフラの検査,惑星での遠隔ロボット操作など,さまざまな遠隔操作ロボットに応用が可能である.
優位性
従来には,重機の遠隔操作のため有線給電ドローンによる映像撮影が行われているが,映像の質や内容については議論されておらず,マルチ飛行カメラを用いた,映像の連続性および映像間の相補性を考慮した制御については,全く開示されていない.また,映像の種類の分析を行い,複数カメラの自動制御システムを提案している研究もあるが,基本的に地面固定カメラを対象としているため,対象が異なる.
提供目的
受託研究、共同研究、技術相談、知財ライセンス
共同発明者
宮田 雅博 , 菅野 重樹 教授 (理工学術院 創造理工学部 総合機械工学科)
関連論文
- 宮田雅博,亀﨑允啓,菅野重樹,“マルチ飛行カメラを用いた遠隔操作用映像提示システム~映像の連続性と映像間の相補性を考慮したカメラの動的配置~”,第18回計測自動制御学会システムインテグレーション部門講演会論文集(SI2017),pp. 2120-2123,2017年12月.
関連URL
他のシーズ
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
-
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
-
ドライバーの状況認識推定・安全運転システム
-
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
-
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
-
自律移動サービスロボットのための先導・追従行動計画システム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
-
待機・迂回を含む後退的行動と接近・接触を含む前進的行動を併せ持つ自律移動ロボットの統合的軌道計画
-
協働作業ロボットの適応的行動決定システム
掲載日:
2018/01/23