1009
情報通信
掲載日:2013/12/25
 第5505881号
第5505881号
項目選択方法および装置
河合 隆史 教授 (理工学術院 基幹理工学部 表現工学科)
3D映像は映画、携帯電話、ゲーム等に取り入れられ、多くのコンテンツや機器類が市場へ導入されている。この発明は、視聴者の眼の焦点深度に着目し3D映像を調整・再生するための技術であり、視聴者が違和感・疲労感を感じずに3D映像を鑑賞することが可能となる。
2019-0312-07
ナノ・材料
掲載日:2019/04/22
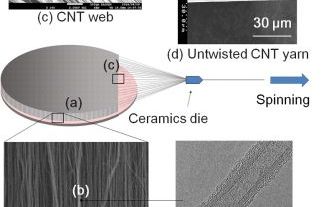
高強度,高導電性,軽量CNT細線の開発
川田 宏之 教授 (理工学術院 基幹理工学部)
◆ 垂直配向CNTアレイから無撚CNT糸を作製(Fig. 1)◆ 黒鉛化処理によってCNTの不純物,欠陥構造を除去◆ ポリマーや金属を複合し(Fig. 2) ,CNT間に荷重伝達力と導電性を付与

2023-0127-01
ナノ・材料
掲載日:2023/01/27
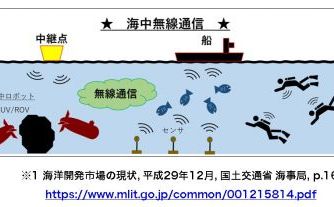
海水のイオン導電性を利用した海中無線通信 ~海水管,漁業用いけす内のワイヤレスリアルタイムモニタリングが可能に~
川原田 洋 教授 (理工学術院 基幹理工学部)
共同研究者: 佐藤 弘隆 、正留 康太 、野本 玲於奈
2020-0131-03
ナノ・材料
掲載日:2020/02/06
電気による新たな海中無線通信の開発
川原田 洋 教授 (理工学術院 基幹理工学部)
◆ 海水の導電性を利用した電気通信 ◆ 送信側:金属電極 ⇔ 受信側:液体中で動作するトランジスタ型センサ◆ 金属電極に矩形波の電圧を印加 ➡ 受信側にパルス波が伝搬
2016-0203-08
ナノ・材料
掲載日:2016/02/03
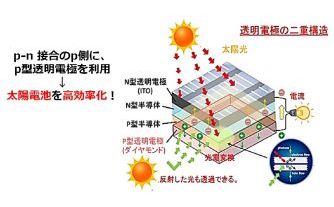
ナノダイヤモンドp型透明電極
川原田 洋 教授 (理工学術院 基幹理工学部)
共同研究者:古閑 三靖
◆高濃度ボロンをドープしても、高い透明性および優れた電気特性を有するナノダイヤモンドp型透明電極体の製造方法◆アンドープのダイヤモンド層上に高濃度ドープ層を重ねた2層構造を形成して実現
2016-0203-07
ナノ・材料
掲載日:2016/02/03
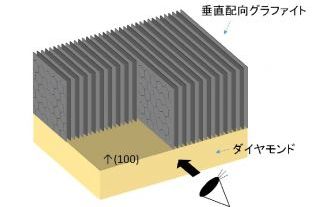
ダイヤモンド基板上の垂直配向グラファイト層
川原田 洋 教授 (理工学術院 基幹理工学部)
共同研究者:稲葉 優文 非常勤講師
◆ダイヤモンド(100)表面に高温イオン注入する◆注入後の熱処理(1700℃、2時間)により、格子間の炭素原子が表面に拡散◆垂直配向グラファイト層が形成
2016-0203-06
ナノ・材料
掲載日:2016/02/03
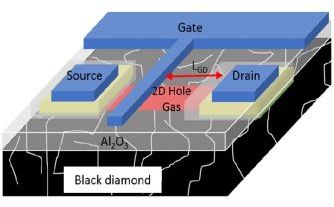
多結晶ダイヤモンド上のパワーMOSFET(ダイヤモンド電界効果トランジスタ及びその製造方法)
川原田 洋 教授 (理工学術院 基幹理工学部)
共同研究者:モフド シャムスル ナシリク ビン サムソル バハリン 、稲葉 優文 非常勤講師 、北林 祐哉 、柴田 将暢
◆多結晶ダイヤモンド(黒い)上にMOSFETを作製 ◆顕著な変調・良好なデバイス特性◆逆阻止耐圧1800Vを達成
1736
ものづくり技術
掲載日:2015/11/03
2017-45897
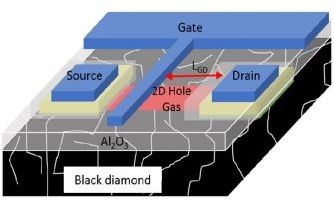
多結晶ダイヤモンド上のパワーMOSFET(ダイヤモンド電界効果トランジスタ及びその製造方法)
川原田 洋 教授 (理工学術院 基幹理工学部)
◆多結晶ダイヤモンド(黒い)上にMOSFETを作製 ◆顕著な変調・良好なデバイス特性◆逆阻止耐圧1800Vを達成
2014-0122-05
ナノ・材料
掲載日:2014/01/23
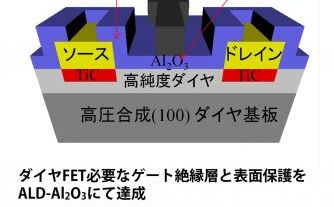
ダイヤモンド半導体を用いた高信頼性電力素子
川原田 洋 教授 (理工学術院 基幹理工学部)
・550℃の大気中でも導電性が確保され、絶縁性が向上した保護膜の製造方法・表面を水素化したダイヤモンド基板上に2層の保護膜を形成することで実現
2018-0927-03
ライフサイエンス
掲載日:2018/09/27
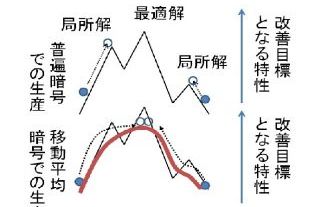
遺伝暗号の新たな方向での改変を活用したタンパク質の進化工学
木賀 大介 教授 (理工学術院)
◆ 被修飾部位が限定されたタンパク質を進化分子工学によって創製◆ 特定のアミノ酸を含まない「単純化遺伝暗号」が鍵◆ 「移動平均暗号表」の活用で、進化の「死の谷」を克服