2017-0223-07
ものづくり技術
掲載日:2017/02/23
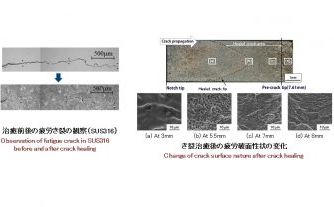
熱処理による金属材料の疲労き裂治癒
細井 厚志 教授 (理工学術院 基幹理工学部)
共同研究者:藤田 耕平 、川田 宏之 教授
◆ き裂先端近傍では約90%の疲労き裂治癒を実現◆ 約75%の静的引張強度の回復を実現 ◆ 真空加熱による酸化膜除去及び塑性誘起き裂閉口、原子拡散による疲労き裂治癒
2017-0223-06
ものづくり技術
掲載日:2017/02/23
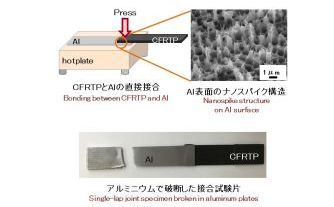
3Dナノ構造界面を有する異種材直接接合
細井 厚志 教授 (理工学術院 基幹理工学部)
共同研究者:阿部 暉 、川田 宏之 教授
◆ Al表面上のナノスパイク構造(NSS)の作製◆ CFRTPとAlのホットプレスによる直接接合◆ シランカップリング処理による接着強度の向上
2017-0223-05
ナノ・材料
掲載日:2017/02/23
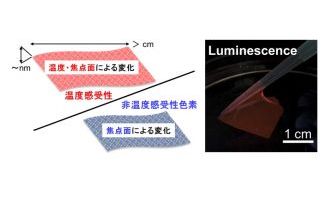
超薄膜 光ルミネッセンスセンサー
藤枝 俊宣 客員主任研究員 (当時)
共同研究者:佐藤 裕崇 (当時)、武岡 真司 教授 (当時)
◆ 自己支持性高分子ナノシート(数十~数百ナノメートル厚)からなる光ルミネッセンスセンサー◆ 担持するセンサー色素の種類に応じて検出項目を選択可能(例:温度・酸素濃度)◆ レシオメトリックな生体情報のセンシング
2017-0223-04
ナノ・材料
掲載日:2017/02/23
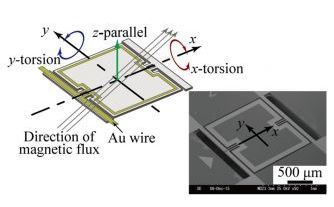
単一入力信号によるMEMSマイクロミラーの3次元駆動
岩瀬 英治 教授 (理工学術院 基幹理工学部)
◆ 単一の駆動機構により3つの共振モードを出力◆ 3つの共振周波数を重ね合わせた一つの信号の入力によって3次元に駆動
2017-0223-03
ものづくり技術
エネルギー
掲載日:2017/02/23
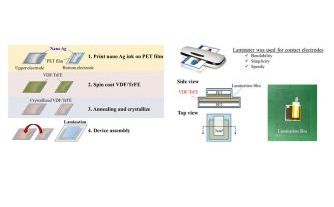
簡易組み立て工程で実現するポリマーエナジーハーベスター
関口 哲志 上級研究員 (研究院(研究機関) ナノ理工学研究機構) (当時)
共同研究者:鎌田 裕樹 (当時)、尹 棟鉉 次席研究員 (当時)、佐々木 敏夫 (当時)、野﨑 義人 (当時)、山浦 真一 (当時)、中嶋 宇史 (当時)、庄子 習一 教授 (当時)
◆ metal nanoinkとインクジェットプリンタで配線 ◆ 圧電材料はVDF/TrFE、スピンコート法で塗布◆ 1μJを超える発電量
2017-0223-02
エネルギー
掲載日:2017/02/23
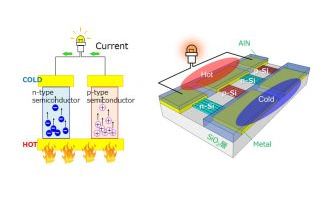
スケーラブル・マイクロ熱電発電デバイスの開発
渡邉 孝信 教授 (理工学術院 基幹理工学部 電子光システム学科)
◆ Siナノワイヤの優れた熱電変換性能を利用◆ Si-LSI製造プロセスで大量生産可能な微小熱電発電デバイス
2017-0223-01
エネルギー
掲載日:2017/02/23
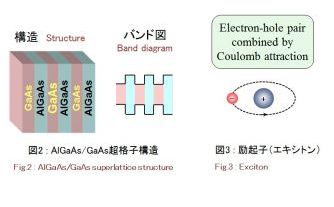
量子効果を利用した高効率薄膜太陽電池の研究
牧本 俊樹 教授 (理工学術院 先進理工学部)
◆ 単接合太陽電池では最適なバンドギャップエネルギーが存在(図1)◆ 量子効果を生み出す超格子構造(図2)による励起子(図3)の生成◆ 励起子による光の効率的な吸収(図4)
1616
社会基盤
掲載日:2017/02/20
 特許第6493962号
特許第6493962号
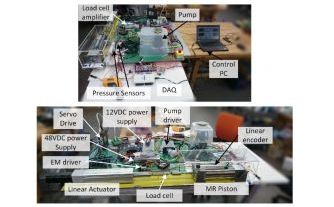
MR流体を用いたバックドライバブルアクチュエータ
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
高応答・高出力・安全性が求められる次世代のロボットシステムには、予期しない外力の付与に対して迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。 本シーズは、応答時間の短縮化を図るとともに、比較的簡易な構成で柔軟性を発揮させることができるバックドライバブルアク...
1872
社会基盤
掲載日:2016/12/06
特許第6863562号
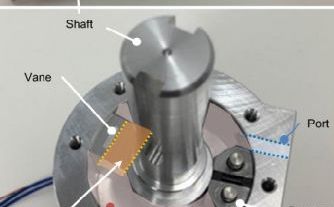
MR流体を用いた逆可動性を有するロータリアクチュエータ
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
高応答・高出力・安全性が求められる次世代のロボットシステムには,予期しない外力の付与に対しても迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。本シーズは,応答時間の短縮化を図るとともに,比較的簡易な構成で本質的な柔軟性を発揮させることができる逆可能型のロー...
2016-1024-08
ライフサイエンス
掲載日:2016/10/24
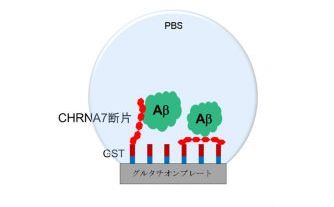
CHRNA7断片を用いたアミロイドß検出法
澤村 直哉 上級研究員 (理工学術院 大学院先進理工学研究科) (当時)
◆ CHRNA7のAß結合部位(約50アミノ酸)を同定◆ 精製したGST-CHRNA7断片用いたAß検出法の検討◆ 膜に吸着したCHRNA7断片に対するAßの結合性を確認

2016-1024-07
ライフサイエンス
掲載日:2016/10/24
新規脳ホルモンGnIHによる思春期早発症と生殖機能障害の新規治療法の開発
筒井 和義 教授 (教育・総合科学学術院 教育学部) (当時)
◆ 生殖機能を抑制する新規脳ホルモン(GnIH)を発見(図1)◆ 生殖機能を抑制するGnIH/GNIH作用の分子機構の解明 - GnIH/GNIHの機能低下が導く中枢性思春期早発症(図2) - GnIH/GNIHの機能亢進が導く中枢性生殖機能障害(図3)
2016-1024-06
ライフサイエンス
掲載日:2016/10/24
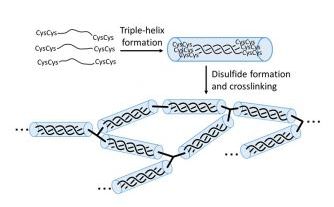
コラーゲン様構造を有する重合ペプチド及びゲル
小出 隆規 教授 (理工学術院)
◆ 化学合成した3重らせんをSS結合で重合させたマテリアル (図1)◆ ハイドロゲルや透明なフィルム状などの形状に加工が可能 (図2)◆ コラーゲン上の機能配列を導入して細胞接着などを制御できる (図3)◆ ゲルの硬さを変化させることによって細胞の振る舞いを制御できる (図4)
2016-1024-05
ナノ・材料
掲載日:2016/10/24
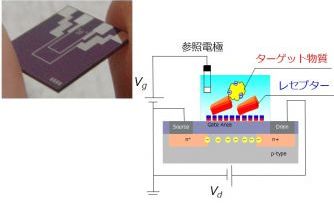
食の安全を守るバイオセンシング技術の開発
秀島 翔 次席研究員 (研究院(研究機関) ナノ理工学研究機構) (当時)
共同研究者:逢坂 哲彌 特任研究教授 (当時)
◆ 半導体バイオセンサを用いて、食品中の微量含有物質の簡易検出を行う。◆ 微量でもアナフィラキシーショックを引き起こす食物アレルゲンの有無を判定する技術を開発した。