立脚期を対称化する歩行リハビリロボット


優位性
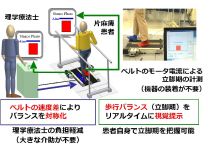
・立脚期を対称化するロボット
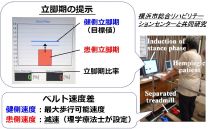
・リアルタイムに立脚期を提示
・左右のベルトの速度差により立脚期を対称化
背景
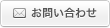
・片麻痺患者の非対称な立脚期
・理学療法士の身体的負担が大
・患者自身で立脚期の把握が困難
シーズ概要
・モータ電流値を用いた立脚期の推定
・立脚期の視覚フィードバック
応用・展開
・健常者の歩行バランスの評価装置
他のシーズ

掲載日:
2015/03/02