筋隆起位置変化に基づくロボット制御


優位性
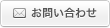
・新たな筋活動信号に基づくロボット制御技術開発
・筋隆起位置の変化に基づいた動作量推定
背景
・不安定な表面筋電位を利用したロボット制御
・表面筋電位による動作量の推定が困難
・操作者の意図反映の必要性
シーズ概要
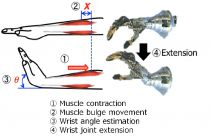
・皮膚表面上の筋隆起位置の計測・算出方法の確立
・筋隆起位置と関節角度の線形関係の利用
応用・展開
・義肢制御における新たな入力信号
・装着型ロボット・ロボットアームにおける利用
他のシーズ

掲載日:
2015/03/02