2591
社会基盤
掲載日:2022/10/07
待機・迂回を含む後退的行動と接近・接触を含む前進的行動を併せ持つ自律移動ロボットの統合的軌道計画
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
2378
フロンティア
ナノ・材料
掲載日:2022/07/11
 特願2022-73083
特願2022-73083
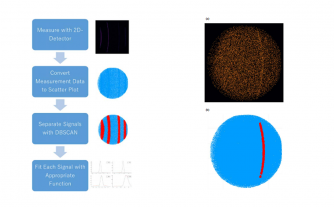
画像処理方法、画像処理装置、X線回折装置およびプログラム
朝日 透 教授 (理工学術院)
本シーズは、データ分析で用いられる密度ベースクラスタリングを応用した画像処理技術に関します。本シーズによれば、平面画像を構成する各画素に対応する位置に各画素の画素値に応じた密度で点を配置し、それらの点に密度に基づくクラスタリングを実行することで、所望の画素値を有する画素が密に...
2360
ものづくり技術
掲載日:2022/05/06
特開2022-45533
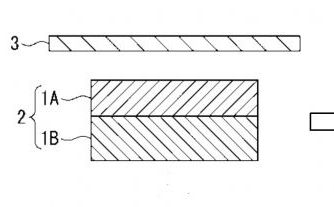
複合材料(CFRP)を用いた曲面の製造方法、製造システム
前川 卓 上級研究員 (理工学術院 理工学術院総合研究所) (当時)
2347
環境
掲載日:2022/03/01
特開2021-175566
細線を用いた電気パルス解体方法(手作業解体からの解放に向けて)
所 千晴 教授 (理工学術院 創造理工学部)
少なくとも2個の部材が接合されてなる対象物の表面の一部分に導電性材料を接触させ、大気中で前記導電性材料に高電圧パルスを印加して衝撃波を発生させて、前記対象物の接合部位に衝撃波を作用させることで前記対象物の部材同士を剥離させる、対象物の解体方法。
2462
社会基盤
掲載日:2022/01/17
特開2023-77151
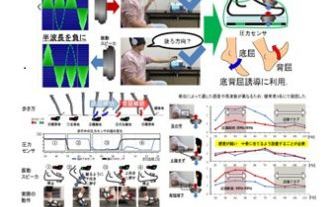
運動促進用超小型軽量ハプティック式歩行補助シューズ
田中 英一郎 教授 (理工学術院 大学院情報生産システム研究科)
世界最小最軽量の歩行補助機。モータ等のアクチュエータを使用せず、振動スピーカを足裏(母指球下)と足の甲(中足骨上)に備え、 非対称波形の振動を適切なタイミングでそれぞれ出力する。すると力の補助はしないが靴が足の底背屈動作を促し、使用者自身の力で地面を蹴り、つま先を上げるので歩行...