2392
社会基盤
掲載日:2020/11/09
特許第7502781号
クラッチ機構を用いた動的重力補償ロボットシステム
シュミッツ アレクサンダー 客員上級研究員 (理工学術院 大学院創造理工学研究科)

2015-1215-03
社会基盤
掲載日:2015/12/15
可変剛性関節を備えたロボットアーム
シュミッツ アレクサンダー 客員上級研究員 (理工学術院 大学院創造理工学研究科)
共同研究者:汪 偉 次席研究員
◆柔軟性を調整可能なアクチュエーター◆プログラミングの容易性◆7自由度のロボットアーム、リーチは1m、可搬重量は5kg
2015-1215-02
社会基盤
掲載日:2015/12/15
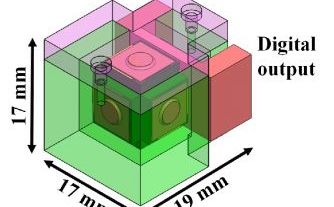
ロボットアーム、ハンド用の小型力覚・トルクセンサ
シュミッツ アレクサンダー 客員上級研究員 (理工学術院 大学院創造理工学研究科)
◆新たな静電容量型6軸力覚・トルクセンサ◆分散触覚センシング用の新たな3軸力覚センサ
2012-0627-01
環境
掲載日:2012/06/27
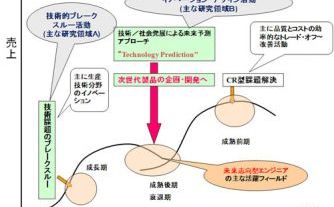
製品価値創造における革新的課題解決法の提案
澤口 学 無期非常勤講師 (理工学術院 大学院創造理工学研究科)
価値ある新製品開発企画・新事業企画のための手法(TRIZ:発明的問題解決理論)の提案。既存製品のクオリティの継続的な向上(改善活動)をめざすのではなく、5~10年先を見据えて社会変化を捉えた付加価値向上型の非連続(ラジカル)イノベーションを目指した新製品開発の方法論を提供する。