2356
社会基盤
掲載日:2020/06/17
 特許第7490193号
特許第7490193号
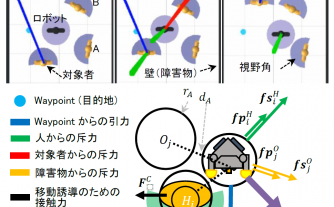
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
混雑環境下で自律移動するロボットの経路生成に適した周囲の人間等を含む移動予測モデルを構築し、ロボットの移動効率と周囲の人間等に与える負担を考慮しながら、最適な移動経路を生成することができるロボット、移動経路生成装置及びそのプログラム、並びに、移動予測装置を提供する。