ロボットになりきるための遠隔操縦システム
2321


- 研究者名
-
研究者情報 大谷 拓也 次席研究員 (退職済)
- 所属
- 専門分野
-
知能ロボティクス,知能機械学・機械システム
- キーワード
- 特許名称
-
遠隔操作システム
- 特許番号
-
特許第7444389号

- 出願人
-
学校法人早稲田大学
- 出願国・地域
-
日本
シーズ概要
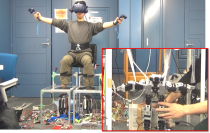
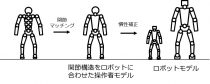
本シーズは、人間の高い運動安定能力を生かしたロボット操縦を可能とするため、ロボットやバーチャルキャラクターといった操縦対象の行動時の安定維持に必要な情報として視覚や足裏力覚情報などを操縦者が理解しやすいよう変換して提示し、さらに操縦者と操縦対象の身体の大きさや重さ・運動能力といった身体的ズレを補正した操縦指令を生成することにより、効果的な操縦を実現する。
効果
操縦対象の足裏が地面から受ける力を操縦者に合わせて提示することで操縦対象の安定性を理解し、操縦対象と操縦者の身体の違いを自動で補正することにより、ロボットなどの操縦対象の大きさや構造に関わらず、使用のための練習が不要な遠隔操縦が可能となる。
応用・展開
構造を問わない作業用ロボットの遠隔操縦性能向上に汎用的に利用できるだけでなく、人間型ロボットの全身を遠隔操縦することによる遠隔旅行体験や遠隔スポーツ、自身の動きに合わせて仮想キャラクターを動かす際のリアリティ向上などへの応用が期待される。
優位性
従来、人間の動作に連動するロボット操縦が提案されているが、ロボットの安定的な運用にはロボットの重要な状態指標を操作者に伝え、操作者の動作をロボットの構造に適した動作に変換する必要がある。
提供目的
受託研究、共同研究、技術相談、知財ライセンス

共同発明者
掲載日:
2020/06/17