
2015-1215-07
社会基盤
掲載日:2015/12/15
「音楽」による人間とロボットの交流
高西 淳夫 教授 (理工学術院)
共同研究者:コセンティノ サラ
◆楽器演奏ロボットには共演者との意思疎通能力が必要(Fig.2)◆言語以外の方法での意思疎通が必要◆マルチセンサ:多種の情報をリアルタイムに同時取得(Fig.3)
2015-1215-06
社会基盤
掲載日:2015/12/15
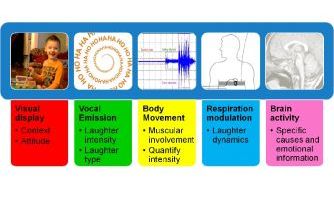
「笑い」による人間とロボットの交流
高西 淳夫 教授 (理工学術院)
共同研究者:コセンティノ サラ
◆笑いのリアルタイム計測システム(Fig.2)◆ウェアラブル:非侵襲かつポータブル◆マルチセンサ:運動および生理的変化を計測
2015-1215-05
社会基盤
掲載日:2015/12/15
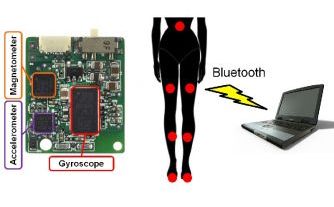
高齢者のバランス能力評価のための装着型センサ
高西 淳夫 教授 (理工学術院)
共同研究者:セッサ サルバトーレ 非常勤講師
◆慣性測定ユニット(IMU)により動きを計測(Fig. 1)◆成人を対象とした片足立ち試験(Fig. 2)◆片足立ち試験の自動分析(Fig. 3)◆歩行異常の自動認識(Fig. 4)
2015-1215-04
社会基盤
掲載日:2015/12/15
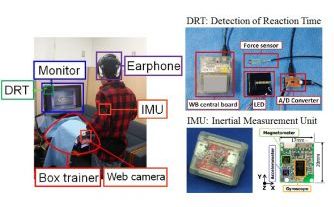
潜在意識に働きかける内視鏡訓練システムの開発
高西 淳夫 教授 (理工学術院)
共同研究者:セッサ サルバトーレ 非常勤講師
◆実験環境と設備(fig.1)◆異なるフィードバック(fig.2)◆最初の訓練試行と最後の訓練試行の姿勢の差(fig.3)◆訓練中の作業負荷(fig.4)
2321
社会基盤
情報通信
掲載日:2020/06/17
 特開2021-160061
特開2021-160061
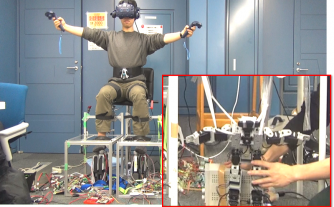
ロボットになりきるための遠隔操縦システム
大谷 拓也 次席研究員 (理工学術院 理工学術院総合研究所) (当時)
本シーズは、人間の高い運動安定能力を生かしたロボット操縦を可能とするため、ロボットやバーチャルキャラクターといった操縦対象の行動時の安定維持に必要な情報として視覚や足裏力覚情報などを操縦者が理解しやすいよう変換して提示し、さらに操縦者と操縦対象の身体の大きさや重さ・運動能力と...

2016-0614-02
ライフサイエンス
掲載日:2016/07/14
顎顔面マッサージロボット
石井 裕之 教授 (理工学術院 理工学術院総合研究所)
共同研究者:高西 淳夫 教授 、勝又 明敏 教授
顎関節症等の疾患に有効な顎顔面マッサージを行うロボットの設計ならびに制御に関する技術.この技術を用いることで,熟練した施術者が行うような力強さとしなやかさを兼ね備えたマッサージが可能.
2016-0614-01
ものづくり技術
掲載日:2016/07/14
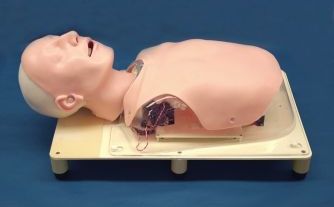
医療手技訓練用ヒューマノイド
石井 裕之 教授 (理工学術院 理工学術院総合研究所)
共同研究者:高西 淳夫 教授
医師など医療従事者の訓練に用いる患者シミュレータに関する技術.アクチュエータによって1台のシミュレータでさまざまな患者を再現することや,センサによって手技を計測し評価することが可能.