2321
社会基盤
情報通信
掲載日:2020/06/17
 特許第7444389号
特許第7444389号
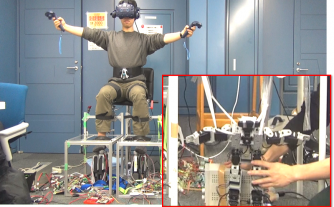
ロボットになりきるための遠隔操縦システム
大谷 拓也 次席研究員 (理工学術院 理工学術院総合研究所) (退職済)
本シーズは、人間の高い運動安定能力を生かしたロボット操縦を可能とするため、ロボットやバーチャルキャラクターといった操縦対象の行動時の安定維持に必要な情報として視覚や足裏力覚情報などを操縦者が理解しやすいよう変換して提示し、さらに操縦者と操縦対象の身体の大きさや重さ・運動能力と...