2645
社会基盤
掲載日:2023/07/06
 特開2024-162293
特開2024-162293
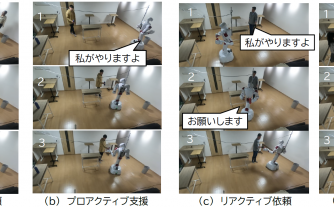
人間の動きを先読みできるロボット
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
このシーズは、ロボットが人間と協働して効率的に作業を行うための動作制御システムで、主な特徴は以下の通り。①人間の行動推定: 人間の位置情報や速度情報の時間的変化を解析し、タスクに対する行動を推定。②動作計画: 推定結果に基づき、ロボットの通常行動、依頼行動(ロボットがタスクを人間に...