show advanced search
-
1-11 / 11
- display number
-
order by date
-
order by researcher's name
-
order by affiliation
2392
Social Infrastructure
posted:2020/11/09
特許第7502781号
クラッチ機構を用いた動的重力補償ロボットシステム
SCHMITZ, Alexander Guest Senior Researcher (Faculty of Science and Engineering Graduate School of Creative Science and Engineering)
2363
Social Infrastructure
posted:2020/08/21
 特許第7525854号
特許第7525854号
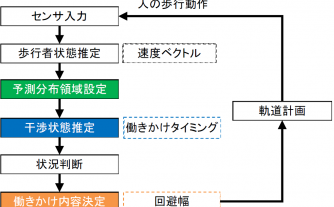
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
本発明は、人の速度ベクトルの測定誤差と将来的な速度ベクトルが現在の値を保持するかを示す保持可能性を考慮することで,軌道計画のロバスト化を目指した経路計画アルゴリズムを提案するものである。人の速度ベクトルの測定誤差と保持可能性を考慮した働きかけのタイミングの決定および人とロボッ...
2356
Social Infrastructure
posted:2020/06/17
特許第7490193号
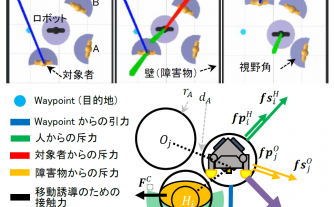
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
混雑環境下で自律移動するロボットの経路生成に適した周囲の人間等を含む移動予測モデルを構築し、ロボットの移動効率と周囲の人間等に与える負担を考慮しながら、最適な移動経路を生成することができるロボット、移動経路生成装置及びそのプログラム、並びに、移動予測装置を提供する。
2220
Social Infrastructure
posted:2019/07/30
特許第7432198号
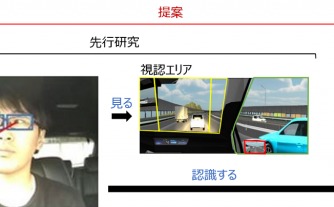
ドライバーの状況認識推定・安全運転システム
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
本発明は、状況認識推定システム及び運転支援システムに係り、更に詳しくは、所定の対象者の周囲を相対移動する認識対象物について、その対象者が適切に認識しているか否かを推定する状況認識推定システム、及び当該状況認識推定システムを利用して、対象者による自動車等の移動体の運転支援を行う...
2182
Social Infrastructure
posted:2019/07/05
特許第7203379号
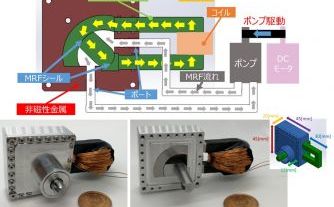
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
人の代替労働力・サポート手段として活躍が期待されるロボットのアクチュエータには、高出力性や高応答性、機構的高柔軟性、堅牢性、良制御性、高エネルギー効率といった諸特性を兼ね備えることが求められている。本シーズは、特に,高出力性と逆可動性という特長を有する磁気粘性流体(MR流体)...
1986
Social Infrastructure
posted:2018/01/15
7036399
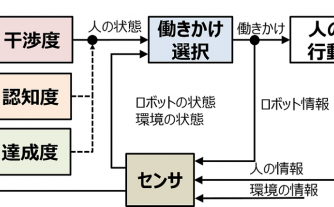
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
移動体と移動障害物との協調移動のために,「ロボットから人への意図伝達度」に着目した人状態推定手法を開発し,双方の動作結果を踏まえた連続的な働きかけ手法を提案する.ロボットのすれ違い幅から働きかけの必要性を判定する「干渉度」,人のロボットに対する認知の有無を判断する「認知度」...
1913
Social Infrastructure
posted:2017/06/20
特許第6916500号
能動的接触力調整エンドエフェクタ
WANG, Wei Junior Researcher (Faculty of Science and Engineering) (retired)
1912
Social Infrastructure
posted:2017/06/20
特許第6866981号
停電時の安全性を持つ可変トルクリミッタ
SCHMITZ, Alexander Guest Senior Researcher (Faculty of Science and Engineering Graduate School of Creative Science and Engineering)
1911
Social Infrastructure
posted:2017/06/20
7028410
可変トルクリミットアクチュエータの制御システム
SCHMITZ, Alexander Guest Senior Researcher (Faculty of Science and Engineering Graduate School of Creative Science and Engineering)

1616
Social Infrastructure
posted:2017/02/20
特許第6493962号
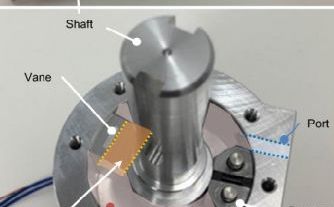
MR流体を用いたバックドライバブルアクチュエータ
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
高応答・高出力・安全性が求められる次世代のロボットシステムには、予期しない外力の付与に対して迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。 本シーズは、応答時間の短縮化を図るとともに、比較的簡易な構成で柔軟性を発揮させることができるバックドライバブルアク...
1872
Social Infrastructure
posted:2016/12/06
特許第6863562号
MR流体を用いた逆可動性を有するロータリアクチュエータ
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
高応答・高出力・安全性が求められる次世代のロボットシステムには,予期しない外力の付与に対しても迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。本シーズは,応答時間の短縮化を図るとともに,比較的簡易な構成で本質的な柔軟性を発揮させることができる逆可能型のロー...