show advanced search
-
1-20 / 59
- display number
-
order by date
-
order by researcher's name
-
order by affiliation
2950
Social Infrastructure
posted:2025/10/20
静的ハンドジェスチャー認識システムおよび静的ハンドジェスチャー認識 プログラム
KAMEOKA, Jun Professor (Faculty of Science and Engineering Graduate School of Information, Production, and Systems)
2948
Social Infrastructure
posted:2025/10/20
超音波画像の探索支援装置及びそのプログラム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2894
Social Infrastructure
posted:2025/10/20
情報処理装置、情報処理方法およびプログラム
TEZUKA, Asei Associate Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
3001
Social Infrastructure
posted:2025/10/20
超音波プローブのジェル塗布システム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2702
Social Infrastructure
posted:2025/07/08
 第7696641号
第7696641号
超音波検査を効率化する画像探索技術 ~心尖部四腔断面を自動描出~
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
本技術は、心臓超音波検査における心尖部四腔断面の画像を自動的に取得するための探索装置とそのプログラムです。深層学習に基づく画像解析により、プローブの適切な位置・姿勢を推定し、熟練技師でなくとも診断に有用な断面画像の取得が可能になります。これにより、検査の効率化と医療従事者の負...
2970
Social Infrastructure
posted:2025/07/07
切り紙構造角度制御装置
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
2947
Social Infrastructure
posted:2025/07/07
固相抽出デバイス、及び、固相抽出方法
MAWATARI, Kazuma Professor (Faculty of Science and Engineering Graduate School of Information, Production, and Systems)
2900
Social Infrastructure
posted:2025/06/27
異常予兆検知システム、異常予兆検知方法及びプログラム
AMANO, Yoshiharu Professor (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
2869
Social Infrastructure
posted:2024/12/03
熱電発電デバイス用基板及び熱電発電デバイス
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
2843
Social Infrastructure
posted:2024/12/03
被子植物の原形質流動活性化剤、成長促進剤、及び成長促進方法
TOMINAGA, Motoki Professor (Faculty of Education and Integrated Arts and Sciences School of Education)
2787
Social Infrastructure
posted:2024/07/05
知覚支援システム、評価装置及びそのプログラム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2645
Social Infrastructure
posted:2023/07/06
特開2024-162293
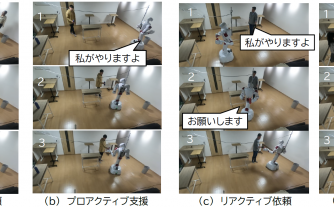
人間の動きを先読みできるロボット
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
このシーズは、ロボットが人間と協働して効率的に作業を行うための動作制御システムで、主な特徴は以下の通り。①人間の行動推定: 人間の位置情報や速度情報の時間的変化を解析し、タスクに対する行動を推定。②動作計画: 推定結果に基づき、ロボットの通常行動、依頼行動(ロボットがタスクを人間に...
2515
Social Infrastructure
posted:2022/05/02
特許第7461664号
照射線量推定装置および照射線量推定方法
KATAOKA, Jun Professor (Faculty of Science and Engineering School of Advanced Science and Engineering Department of Applied Physics)
2462
Social Infrastructure
posted:2022/01/17
特開2023-77151
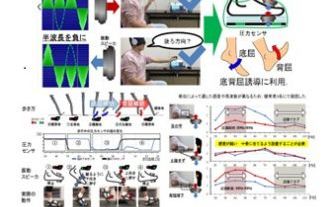
運動促進用超小型軽量ハプティック式歩行補助シューズ
TANAKA, Eiichiro Professor (Faculty of Science and Engineering Graduate School of Information, Production, and Systems)
世界最小最軽量の歩行補助機。モータ等のアクチュエータを使用せず、振動スピーカを足裏(母指球下)と足の甲(中足骨上)に備え、 非対称波形の振動を適切なタイミングでそれぞれ出力する。すると力の補助はしないが靴が足の底背屈動作を促し、使用者自身の力で地面を蹴り、つま先を上げるので歩行...
2505
Social Infrastructure
posted:2021/12/08
第7698306号
僧帽弁を基点とした傍胸骨左縁左室長軸像探索手法
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2504
Social Infrastructure
posted:2021/12/08
第7668529号
心エコー検査ロボット
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2484
Social Infrastructure
posted:2021/10/12
第7652389号
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)