人間の動きを先読みできるロボット
2645



- researcher's name
- affiliation
- research field
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- keyword
- patent name
-
ロボット、ロボットの行動決定システム及びそのプログラム
- publication number
-
特開2024-162293

- applicants
-
学校法人早稲田大学
- region
-
日本
summary
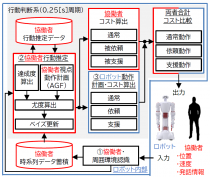
このシーズは、ロボットが人間と協働して効率的に作業を行うための動作制御システムで、主な特徴は以下の通り。①人間の行動推定: 人間の位置情報や速度情報の時間的変化を解析し、タスクに対する行動を推定。②動作計画: 推定結果に基づき、ロボットの通常行動、依頼行動(ロボットがタスクを人間に依頼)、支援行動(ロボットが人間を支援)の中から最適な行動を選択。③協働作業コスト: タスクごとの負荷を計算し、作業の効率を最大化。④柔軟性: 状況に応じてリアルタイムで動作を調整。
effect
人間とロボットの協働作業の効率向上を目指し、作業分担を動的に調整することで、効率的な協働が実現されます。ロボットは人間の動きや行動意図に合わせて動作を調整できるため、多様な環境に適応可能です。また、通常行動、依頼行動、支援行動を状況に応じて選択することで、最適な作業プロセスを実現します。さらに、人間とロボットの相互作用を滑らかに行うことで、作業現場での混乱や非効率を最小化し、安定した協働が可能となります。
application/development
1.製造業・物流業: 工場や倉庫での共同作業(物品の移動や検査作業など)。2.医療・介護分野: 看護ロボットや介護ロボットとして、人間の動きに合わせたサポート。3.家庭用ロボット: 掃除や整理整頓などの日常作業での支援。4.災害対応ロボット: 救助活動時に人間と協力して効率的にタスクを分担。5.サービス産業: 接客や荷物運搬など、人とロボットが共同で行う作業。
predominance
ロボットは高精度な行動推定により、人間の行動をリアルタイムで推定し、即座に対応することが可能です。また、依頼行動や支援行動を選択できるため、人間の負担を軽減します。さらに、負荷を定量的に評価し、効率的な作業を自動的に選択することで、効率的なコスト計算が実現されます。ロボットはさまざまな業界や用途に対応可能な汎用性を持ち、相互適応性により、人間とロボットのスムーズな協力を促進します。
purpose of providing seeds
Sponsord research, Collaboration research, Technical consultation, IP licensing

collaborative inventors
濱田 太郎 , 山口 皓大 , 三宅 太文 , 菅野 重樹
related paper
- 協働作業者の行動推定と譲り合いに基づく協働作業ロボットの適応的行動決定システム
- マニュピレーションを考慮した協働作業ロボットの適応的ゴール位置探索とアーム軌道計画手法の開発
related url
same researcher's seeds
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
-
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
-
ドライバーの状況認識推定・安全運転システム
-
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
-
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
-
自律移動サービスロボットのための先導・追従行動計画システム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
posted:
2023/07/06