「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
1986



- researcher's name
- affiliation
- research field
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- keyword
- patent name
-
自律移動ロボット、並びに、その制御装置及び動作制御プログラム
- Patent No.
-
7036399

- applicants
-
学校法人早稲田大学
- region
-
日本
summary
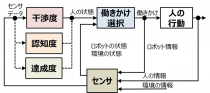
移動体と移動障害物との協調移動のために,「ロボットから人への意図伝達度」に着目した人状態推定手法を開発し,双方の動作結果を踏まえた連続的な働きかけ手法を提案する.ロボットのすれ違い幅から働きかけの必要性を判定する「干渉度」,人のロボットに対する認知の有無を判断する「認知度」,ロボットの働きかけがどの程度達成されたかを計算し,再度の働きかけ必要性を判断する「働きかけ達成度」で構成されている.
effect
移動ロボットが,周囲の人に過剰な不快感を与えず,自身の移動目的を効率よく達成する行動をとるためには,ロボットが人の状態を推定し,その状態に応じた適切な働きかけを適宜(繰り返して)行うことが有効である.本発明では,協調移動のためのコア技術となる「ロボットから人への意図伝達度」に着目した人状態推定手法を開発し,連続的な働きかけによる協調移動を実現する.本システムを用いることで,意図推定が間違っていても行動を取り直すことができるため,ロボットおよび人がより自然かつスムーズにすれ違えるようになると考えられる.
application/development
自動運転車や掃除ロボット,パーソナルモビリティなど,移動障害物を回避する必要のある自律移動体に広く導入できる技術である.応用可能である.また,工場や人混み環境での物品の運搬,駅構内での人の誘導,警備など移動を扱うサービス全般に利用できると考えている.
predominance
移動体と移動障害物とが,譲り合いながら移動する基本的な概念が提案されているものもあるが,本発明では,相手の認知度や,相手とのインタラクション(意図の授受)の方法や,譲り合いが上手くいかなかった場合の連続的なインタラクション方法が盛り込まれている点が優位である.
purpose of providing seeds
Sponsord research, Collaboration research, Technical consultation, IP licensing

collaborative inventors
河野 遼介 , 小林 彩乃 , 菅野 重樹 教授 (理工学術院 創造理工学部 総合機械工学科)
related paper
- Mitsuhiro Kamezaki, Ayano Kobayashi, Yuta Yokoyama, Hayato Yanagawa, Moondeep Shrestha, and Shigeki Sugano, “A Preliminary Study of Interactive Navigation Framework with Situation-Adaptive Multimodal Inducement: Pass-by Scenario,” International Journal of Social Robotics, vol .xx, no. yy, pp. 1-22, July 2019. 10.1007/s12369-019-00574-3 河野遼介,亀﨑允啓,小林彩乃,柳川勇人,大西智也,円谷優佑,シュレスタ ムーンディプ,菅野重樹,“連続的な働きかけによる協調移動手法の提案~ロボットから人への意図伝達度に着目した人状態推定技術~”,第18回計測自動制御学会システムインテグレーション部門講演会論文集(SI2017),pp, 2606-2609,2017年12月.
related url
same researcher's seeds
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
-
ドライバーの状況認識推定・安全運転システム
-
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
-
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
-
自律移動サービスロボットのための先導・追従行動計画システム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
-
人間の動きを先読みできるロボット
posted:
2018/01/15