歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
2363



- researcher's name
- affiliation
- research field
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- keyword
- patent name
-
ロボット及びその制御装置、並びに、移動範囲推定装置及びそのプログラム
- Patent No.
-
特許第7525854号

- applicants
-
学校法人早稲田大学
- region
-
日本
summary
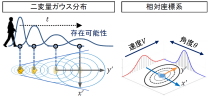
本発明は、人の速度ベクトルの測定誤差と将来的な速度ベクトルが現在の値を保持するかを示す保持可能性を考慮することで,軌道計画のロバスト化を目指した経路計画アルゴリズムを提案するものである。人の速度ベクトルの測定誤差と保持可能性を考慮した働きかけのタイミングの決定および人とロボットが互いに避けるために必要となる回避量の調整、さらに、安全に人を回避するための枠組みとして行動の制限を行う。
effect
本発明では、予測分布領域により、所定の将来時刻において、移動障害物の将来的な移動範囲が推定され、その移動範囲内における各地点での存在確率が特定される。この存在確率により、移動障害物の将来的な移動における外乱に応じた干渉確率が導出され、当該干渉確率の大きさに応じて働きかけの要否が決定される。つまり、移動障害物の将来的な存在範囲のブレに対応し、ロボットの移動経路生成時のリプランニングを最小限にして移動障害物との干渉を効率良く回避でき、移動障害物の移動における外乱の影響を最小限に抑えた移動制御システムのロバスト化を図ることができる。
application/development
本発明に係るロボットとしては、自律移動型のロボットに限定されるものではなく、自動車両、船舶、飛行体等、所定の空間内を自律的に移動可能な移動体の他に、所定範囲の空間内で移動するロボットアーム等のマニピュレータであってもよく、これら移動時における対象歩行者との干渉を回避する際の手法としても適用可能である。
predominance
将来的な歩行者の速度ベクトルが不確実である程、従前の経路計画をリセットして再設定する作業が何度も繰り返し行われるため、経路計画に際する処理が非効率となる。加えて、従来のアルゴリズムでは、ロボットが必要最低限の回避しか行わないため、想定に対して人間の速度ベクトルが少しでも変化すると、更に歩行者に接近した時点で再度干渉する可能性が生じ、ロボットをより大きく回避させる必要が生じ得る場合がある。本発明は、このような課題に着目して案出されたものであり、その目的は、移動障害物の将来的な予想位置のブレを想定し、移動障害物との干渉を効率良く回避できるロボット及びその制御装置と、それらに適用可能な移動範囲推定装置及びそのプログラムを提供することにある。
purpose of providing seeds
Sponsord research, Collaboration research, Technical consultation, IP licensing

collaborative inventors
河野 遼介 , 菅野 重樹 教授 (理工学術院 創造理工学部 総合機械工学科)
related paper
- 斎藤喬介,河野遼介,平山三千昭,亀﨑允啓,菅野重樹,“移動ロボット軌道計画のロバスト化に関する研究~人の速度ベクトルの保持可能性および測定誤差の推定~”,第38回日本ロボット学会学術講演会論文集(RSJ2020),paper no. 3I1-04,2020年9月.
- 平山三千昭,亀﨑允啓,河野遼介,菅野重樹,“Iterative Dynamic Waypoint Navigationによる複数移動障害物の回避軌道計画とその計算効率化”,日本機械学会 2020年度年次大会,paper no. J16106,2020年9月.
- 小林彩乃,河野遼介,平山三千昭,亀﨑允啓,菅野重樹,“Dynamic Waypoint Navigation による移動障害物の実時間回避軌道探索手法の提案”,第19回計測自動制御学会システムインテグレーション部門講演会論文集(SI2018),pp. 811-814,2018年12月.
related url
same researcher's seeds
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
-
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
-
ドライバーの状況認識推定・安全運転システム
-
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
-
自律移動サービスロボットのための先導・追従行動計画システム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
-
人間の動きを先読みできるロボット
posted:
2020/08/21