MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
2182



- researcher's name
- affiliation
- research field
-
知能機械学・機械システム,知能ロボティクス,ヒューマンインタフェース・インタラクション
- keyword
- patent name
-
アクチュエータシステム
- Patent No.
-
特許第7203379号

- applicants
-
学校法人早稲田大学
- region
-
日本
summary
人の代替労働力・サポート手段として活躍が期待されるロボットのアクチュエータには、高出力性や高応答性、機構的高柔軟性、堅牢性、良制御性、高エネルギー効率といった諸特性を兼ね備えることが求められている。本シーズは、特に,高出力性と逆可動性という特長を有する磁気粘性流体(MR流体)を用いた流体駆動アクチュエータを提供することができる。
effect
本シーズによれば、駆動特性を変化させるために、磁場の付与によるMR流体の粘性変化が利用されるため、逆可動性の向上、低出力慣性、高い操作帯域幅、トルク-質量比の向上、応答時間の短縮化、及び、出力トルクの正確な制御性等の種々の特性を駆動装置に保有させることができ、人の生活空間で共存するロボット等の駆動装置として好適となる。
application/development
本シーズは、重作業アプリケーション(建築ロボット、建設ロボット、土木ロボット,ダンパー,クラッチ,ブレーキなど),産業アプリケーション(協働ロボット、重量物ハンドリングロボット、一般製造業向けロボット),生活支援アプリケーション(介助ロボット、搬送ロボット)などに応用・展開できる。
predominance
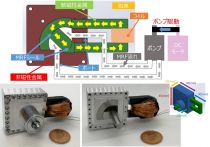
提案するアクチュエータは、従来の電気/油圧アクチュエータでは実現が難しかった高出力密度・高逆可動性・高制御性の両立が最大の特長である。磁気粘性流体を作動油とし、流体の流量制御と連通流路の磁界制御を行うことで、トルク・速度・逆可動性を任意の組み合わせへ高速に調整できる。
purpose of providing seeds
Sponsord research, Collaboration research, Technical consultation, IP licensing
collaborative inventors
大槻 健史郎 , 張 裴之 , 菅野 重樹 教授 (理工学術院 創造理工学部 総合機械工学科)
related paper
- [1] S. Shembekar, P. Zhang, Z. He, R. Tsunoda, M. Kamezaki, and S. Sugano, “Preliminary Development of a Powerful and Backdrivable Robot Gripper Using Magnetorheological Fluids,” Proceedings of 2020 International Symposium on Automation and Robotics in Construction (ISARC2020), pp. 1458-1463, Oct. 2020.
- [2] 亀﨑允啓,坂本裕之,“次世代産業用ソフトロボットの実現に向けた革新的MR材料×駆動機構の融合研究開発”,第38回日本ロボット学会学術講演会論文集(RSJ2020),paper no. 2B3-04,2020年9月.
- [3] 角田龍一朗,亀﨑允啓,張裴之,シェンベカル サヒル,何卓頤,菅野重樹,“磁気粘性流体を作動流体とした逆可動性と高出力性を有するロボットアームの開発”,第38回日本ロボット学会学術講演会論文集(RSJ2020),paper no. 1A1-06,2020年9月.
- [4] (解説記事)亀﨑允啓,“新産業創出のための機能性材料とメカトロニクスの融合デザイン~磁気応答性材料を用いたロボットアクチュエータ~”,BIO INDUSTRY(シーエムシー出版),vol. 37,no. 1,pp. 26-34,2020年1月.
- [5] (解説記事)亀﨑允啓,“材料×機構の融合デザイン:逆可動性を有する磁気粘性流体アクチュエータユニット”,油空圧技術,vol. 58,no. 10,pp. 44-49,2019年10月.
- [6] 大槻健史朗,亀﨑允啓,張裴之,何卓頤,菅野重樹,“磁気粘性流体を用いた低摺動ベーン形ロータリアクチュエータの開発”,第37回日本ロボット学会学術講演会論文集(RSJ2019),paper no. 1C2-04,2019年9月.
- [7] P. Zhang, M. Kamezaki, K. Otsuki, Z. He, H. Sakamoto, and S.i Sugano, “Development of Anti-Sedimentation Magnetorheological Fluids and Its Implementation to MRF Damper,” Proceedings of 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2019), pp. 400-405, July 8-12, 2019, Hong Kong.
- [8] 大槻健史郎,亀﨑允啓,張裴之,何卓頤,菅野重樹,坂本裕之,“分離沈降抑制型磁気粘弾性流体の試製とMRダンパー機構への実装および評価”,第36回日本ロボット学会学術講演会論文集(RSJ2018),paper no. 3P2-02,2018年9月.(第34回日本ロボット学会学術奨励賞)
same researcher's seeds
-
 MR流体を用いた逆可動性を有するロータリアクチュエータ
MR流体を用いた逆可動性を有するロータリアクチュエータ
-
MR流体を用いたバックドライバブルアクチュエータ
-
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
-
ドライバーの状況認識推定・安全運転システム
-
複数人移動予測に基づく混雑環境下でのロボットの接近・接触移動技術
-
歩行者の移動予測技術およびそれに基づく移動ロボットの経路計画アルゴリズム
-
自律移動サービスロボットのための先導・追従行動計画システム
-
接触力と連続的な剪断力を提示可能な3軸ウェアラブルハプティックデバイス
-
目的地周辺の人の位置やロボットのタスク内容等に合わせて適切なゴール位置を動的探索するシステム
-
人間の動きを先読みできるロボット
posted:
2019/07/05