show advanced search
-
1-3 / 3
- display number
-
order by date
-
order by researcher's name
-
order by affiliation
2182
Social Infrastructure
posted:2019/07/05
 特許第7203379号
特許第7203379号
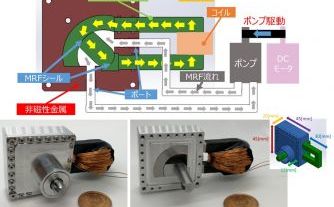
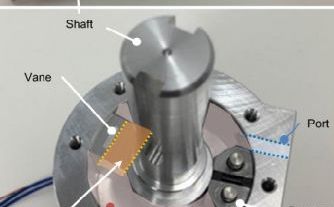
MR流体を用いた逆可動性を有する小型パワフルアクチュエータ
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
人の代替労働力・サポート手段として活躍が期待されるロボットのアクチュエータには、高出力性や高応答性、機構的高柔軟性、堅牢性、良制御性、高エネルギー効率といった諸特性を兼ね備えることが求められている。本シーズは、特に,高出力性と逆可動性という特長を有する磁気粘性流体(MR流体)...

1616
Social Infrastructure
posted:2017/02/20
特許第6493962号
MR流体を用いたバックドライバブルアクチュエータ
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
高応答・高出力・安全性が求められる次世代のロボットシステムには、予期しない外力の付与に対して迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。 本シーズは、応答時間の短縮化を図るとともに、比較的簡易な構成で柔軟性を発揮させることができるバックドライバブルアク...
1872
Social Infrastructure
posted:2016/12/06
特許第6863562号
MR流体を用いた逆可動性を有するロータリアクチュエータ
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
高応答・高出力・安全性が求められる次世代のロボットシステムには,予期しない外力の付与に対しても迅速に応答可能な柔軟性を有する新たなアクチュエータが要請されている。本シーズは,応答時間の短縮化を図るとともに,比較的簡易な構成で本質的な柔軟性を発揮させることができる逆可能型のロー...