show advanced search
-
1-5 / 5
- display number
-
order by date
-
order by researcher's name
-
order by affiliation
2645
Social Infrastructure
posted:2023/07/06
 特開2024-162293
特開2024-162293
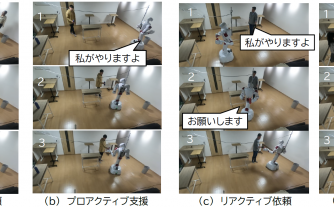
人間の動きを先読みできるロボット
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
このシーズは、ロボットが人間と協働して効率的に作業を行うための動作制御システムで、主な特徴は以下の通り。①人間の行動推定: 人間の位置情報や速度情報の時間的変化を解析し、タスクに対する行動を推定。②動作計画: 推定結果に基づき、ロボットの通常行動、依頼行動(ロボットがタスクを人間に...
2321
Social Infrastructure
Information Communication
posted:2020/06/17
特許第7444389号
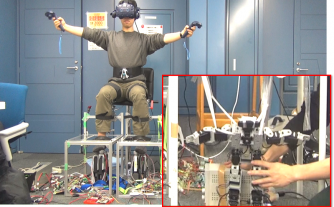
ロボットになりきるための遠隔操縦システム
OTANI, Takuya Junior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering) (retired)
本シーズは、人間の高い運動安定能力を生かしたロボット操縦を可能とするため、ロボットやバーチャルキャラクターといった操縦対象の行動時の安定維持に必要な情報として視覚や足裏力覚情報などを操縦者が理解しやすいよう変換して提示し、さらに操縦者と操縦対象の身体の大きさや重さ・運動能力と...
2016-0614-01
Manufacturing Technology
posted:2016/07/14
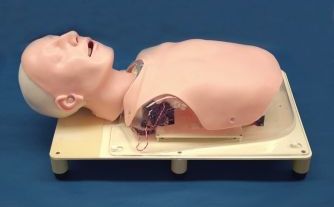
医療手技訓練用ヒューマノイド
ISHII, Hiroyuki Professor (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
collaborative researchers:TAKANISHI, Atsuo Professor
医師など医療従事者の訓練に用いる患者シミュレータに関する技術.アクチュエータによって1台のシミュレータでさまざまな患者を再現することや,センサによって手技を計測し評価することが可能.

2016-0614-02
Life sciences
posted:2016/07/14
顎顔面マッサージロボット
ISHII, Hiroyuki Professor (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
collaborative researchers:TAKANISHI, Atsuo Professor , 勝又 明敏 教授
顎関節症等の疾患に有効な顎顔面マッサージを行うロボットの設計ならびに制御に関する技術.この技術を用いることで,熟練した施術者が行うような力強さとしなやかさを兼ね備えたマッサージが可能.
1488
Social Infrastructure
posted:2015/07/10
特許第6270115号
分散設置型インタラクティブ運動支援システム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
参加者の運動を運動中に評価し、適切さについてのフィードバックを複数の画像などの感覚情報として与えることにより、参加者が運動の不適切さに気づき,自身で適切な運動を形作っていけるように誘引するシステム