1986
社会基盤
掲載日:2018/01/15
 7036399
7036399
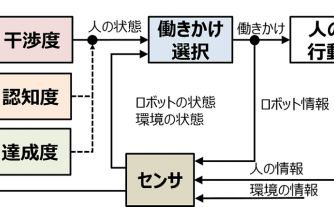
「ロボットから人への意図伝達度」に着目した移動ロボットの行動戦略
亀崎 允啓 客員上級研究員 (理工学術院 理工学術院総合研究所)
移動体と移動障害物との協調移動のために,「ロボットから人への意図伝達度」に着目した人状態推定手法を開発し,双方の動作結果を踏まえた連続的な働きかけ手法を提案する.ロボットのすれ違い幅から働きかけの必要性を判定する「干渉度」,人のロボットに対する認知の有無を判断する「認知度」...