show advanced search
-
101-120 / 430
- display number
-
order by date
-
order by researcher's name
-
order by affiliation

2023-0127-06
Nanotechnology / Materials
posted:2023/01/27
切り紙構造を用いたフレキシブル熱電発電デバイス
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
2020-1124-03
Nanotechnology / Materials
posted:2020/12/17
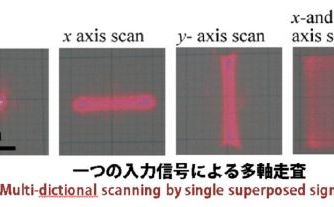
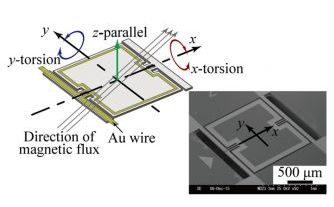
Operation of 3-D MEMS micro mirror by single superposed driving signal
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
● By single driving apparatus, MEMS micro mirror is actuated in three resonant modes● MEMS micro mirror is operated in 3-D by single superposed signal with the three resonant frequencies
2019-0312-06
Nanotechnology / Materials
posted:2019/04/22
Display Device for Visual Texture
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
● We proposed spatial mixing using glossy and matte surfaces for reconstruction of visual texture.● Our method can display various visual texture by changing the area ratio of glossy and matte surfaces.
2017-0223-04
Nanotechnology / Materials
posted:2017/02/23
Operation of 3-D MEMS Micro Mirror by Single Superposed Driving Signal
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
● By single driving apparatus, MEMS micro mirror is actuated in three resonant modes● MEMS micro mirror is operated in 3-D by single superposed signal with the three resonant frequencies
1827
Nanotechnology / Materials
posted:2016/07/05
 第6773956号
第6773956号
曲げ変形および伸縮変形可能な電子デバイス
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
1828
Nanotechnology / Materials
posted:2016/07/05
第6749630号
視覚的質感提示デバイスおよび視覚的質感提示方法
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
2015-0303-06
Nanotechnology / Materials
posted:2015/03/03
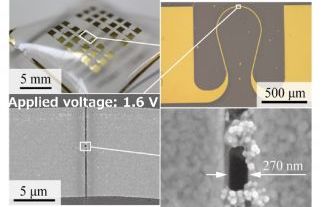
Self-healing Metal Wire for Stretchable Devices
IWASE, Eiji Professor (Faculty of Science and Engineering School of Fundamental Science and Engineering)
collaborative researchers:古志 知也
・High conductivity, and high stretchability for electric wire・Selective healing of a crack on a wire by “self-healing”function
2787
Social Infrastructure
posted:2024/07/05
知覚支援システム、評価装置及びそのプログラム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2505
Social Infrastructure
posted:2021/12/08
特開2023- 70601
僧帽弁を基点とした傍胸骨左縁左室長軸像探索手法
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2504
Social Infrastructure
posted:2021/12/08
第7668529号
心エコー検査ロボット
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
2020-0131-01
Nanotechnology / Materials
posted:2020/02/06
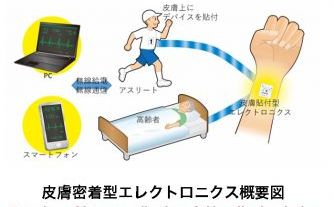
Skin-adhesive battery-less device communicating by hand touch
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
● Flexible electric devices mounted on polymer nanosheets ● Battery-less communication by electric NFC ● Wearable devices without discomfort due to glue contact
2246
Social Infrastructure
posted:2019/10/16
特許第7270928号
妊婦超音波検査ロボットにおける画像鮮明性を維持可能な腹部非下降走査デバイス
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
1991
Social Infrastructure
posted:2018/01/15
第7014383号
超音波プローブ移動装置
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
1556
Social Infrastructure
posted:2016/01/06
特許第6308464号
半側空間無視の注意再獲得支援システム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
半側空間無視患者に対するリハビリテーションを支援するためのシステムであり、訓練用画像内の一部領域のみを視認可能にするスリット領域を移動、拡大させるように訓練者に提示することで、訓練者の訓練用画像に対する注意部分を移動させる。これにより、訓練者は、「固定」、「解放」、「移動」の...
2015-1215-01
Social Infrastructure
posted:2015/12/15
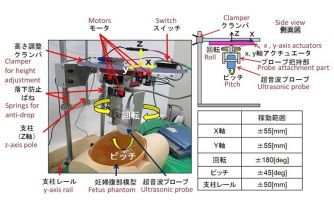
Ultrasonic Diagnosis Support Robot for Prenatal Care
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
● Online service : The obstetrician controls“Tenang”via teleoperation to see the ultrasonic images and diagnosis in real time.● Offline service : “Tenang” moves automatically to get and send the fetus images. The obstetrician checks them by the image reconstruction system.
1488
Social Infrastructure
posted:2015/07/10
特許第6270115号
分散設置型インタラクティブ運動支援システム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
参加者の運動を運動中に評価し、適切さについてのフィードバックを複数の画像などの感覚情報として与えることにより、参加者が運動の不適切さに気づき,自身で適切な運動を形作っていけるように誘引するシステム
2011-1031-01
Life sciences
Manufacturing Technology
posted:2014/05/21
Biofeedback-type perception support robot technology for cognitive-neuro rehabilitation
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
Accumulation of developmental knowledge and clinical data on perception support robot technology (RT) to aid in the rehabilitation of hemiplegic patients. A mechanism devised for communicating the ground conditions under the paralyzed foot to the healthy side by a unit that di...

2013-1017-03
Life sciences
posted:2013/10/25
非侵襲的内出血抽出アルゴリズム
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
・救急医療における内出血検出(FAST)の感度向上・超音波画像処理に基づき血液貯留の疑義箇所を抽出する診断支援システムの構築

2013-1017-02
Life sciences
posted:2013/10/25
モバイル端末操作型エコー遠隔診断ロボット
IWATA, Hiroyasu Professor (Faculty of Science and Engineering School of Creative Science and Engineering)
・遠隔地医師によるモバイル端末の操作で,救急搬送中の外傷患者の内出血の有無を診断可能・開発した操作アプリ・ロボット・通信技術を妊婦健診に活用することで新たなビジネスプランを創出
2645
Social Infrastructure
posted:2023/07/06
特開2024-162293
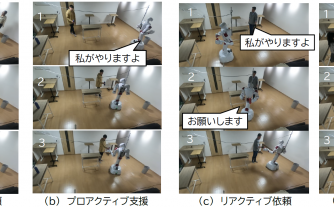
人間の動きを先読みできるロボット
KAMEZAKI, Mitsuhiro Guest Senior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
このシーズは、ロボットが人間と協働して効率的に作業を行うための動作制御システムで、主な特徴は以下の通り。①人間の行動推定: 人間の位置情報や速度情報の時間的変化を解析し、タスクに対する行動を推定。②動作計画: 推定結果に基づき、ロボットの通常行動、依頼行動(ロボットがタスクを人間に...