歩いて走るロボット結晶


背景
◆ ヒトとロボットの融和する未来社会
◆ 柔らかく軽い「ソフトロボット」が必要
◆ 外部刺激で動くアクチュエータが必要
◆ 柔らかく軽い「ソフトロボット」が必要
◆ 外部刺激で動くアクチュエータが必要
シーズ概要
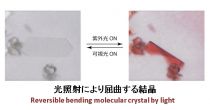
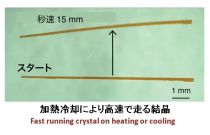
◆ 光や熱で動く結晶アクチュエータ
◆ 軽くてタフな有機メカニカル結晶
◆ ソフトロボットへの実用化
◆ 軽くてタフな有機メカニカル結晶
◆ ソフトロボットへの実用化
優位性
◆ 安価で作製が容易
◆ 軽くて高出力で高い耐久性
◆ 光や熱への速い応答性
◆ 軽くて高出力で高い耐久性
◆ 光や熱への速い応答性
応用・展開
◆ カテーテル・人工筋肉
◆ 物質輸送
◆ ヒト型ソフトロボット
◆ 物質輸送
◆ ヒト型ソフトロボット


共同研究者
掲載日:
2020/02/06