show advanced search
-
1-8 / 8
- display number
-
order by date
-
order by researcher's name
-
order by affiliation

2015-1215-07
Social Infrastructure
posted:2015/12/15
Human-Robot Musical Interaction
TAKANISHI, Atsuo Professor (Faculty of Science and Engineering)
collaborative researchers:コセンティノ サラ
● Musical robots must be able to communicate with partner artists(Fig.2)● Musical robots should recognize and send real-time non-verbal signals● Sensor system for real-time non-verbal signals monitoring● Multi-sensor: detects several signals at once (Fig.3)
2015-1215-06
Social Infrastructure
posted:2015/12/15
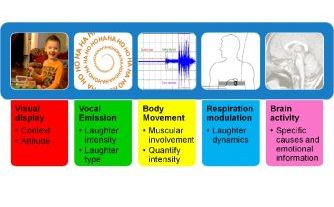
Human-Robot Laughter Interaction
TAKANISHI, Atsuo Professor (Faculty of Science and Engineering)
collaborative researchers:コセンティノ サラ
● Sensor system for real-time laughter monitoring(Fig.2)● Wearable: non-invasive and portable ● Multi-sensor: measure all laughter-related body changes
2015-1215-05
Social Infrastructure
posted:2015/12/15
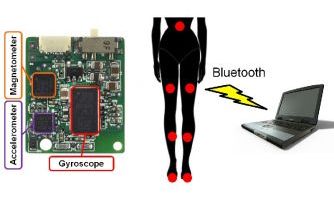
Development of a Wearable Motion Capture System for Balance Evaluation of Older Adults
TAKANISHI, Atsuo Professor (Faculty of Science and Engineering)
collaborative researchers:SESSA, Salvatore Part-time Lecturer
● Inertial Measurements Unit (IMU) motion capture system (Fig.1)● One Leg Stance test with older adults (Fig.2) ● Automatic One Leg Stance segmentation (Fig.3)● Auto-detection of gait abnormality (Fig.4)
2015-1215-04
Social Infrastructure
posted:2015/12/15
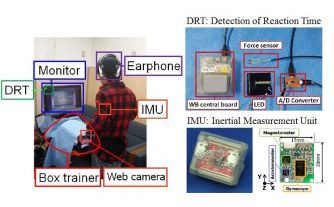
Development of Subliminal Persuasion System for Laparoscopic Training
TAKANISHI, Atsuo Professor (Faculty of Science and Engineering)
collaborative researchers:SESSA, Salvatore Part-time Lecturer
● Experimental setup and materials(fig.1)● Different types of feedback(fig.2)● The different between first trial and last trial(fig.3)● Workload of each group during laparoscopic training(fig.4)
2321
Social Infrastructure
Information Communication
posted:2020/06/17
 特許第7444389号
特許第7444389号
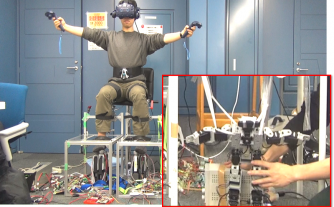
ロボットになりきるための遠隔操縦システム
OTANI, Takuya Junior Researcher (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering) (retired)
本シーズは、人間の高い運動安定能力を生かしたロボット操縦を可能とするため、ロボットやバーチャルキャラクターといった操縦対象の行動時の安定維持に必要な情報として視覚や足裏力覚情報などを操縦者が理解しやすいよう変換して提示し、さらに操縦者と操縦対象の身体の大きさや重さ・運動能力と...

2016-0614-02
Life sciences
posted:2016/07/14
顎顔面マッサージロボット
ISHII, Hiroyuki Professor (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
collaborative researchers:TAKANISHI, Atsuo Professor , 勝又 明敏 教授
顎関節症等の疾患に有効な顎顔面マッサージを行うロボットの設計ならびに制御に関する技術.この技術を用いることで,熟練した施術者が行うような力強さとしなやかさを兼ね備えたマッサージが可能.
2016-0614-01
Manufacturing Technology
posted:2016/07/14
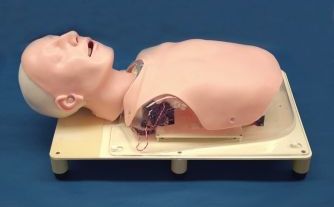
医療手技訓練用ヒューマノイド
ISHII, Hiroyuki Professor (Faculty of Science and Engineering Waseda Research Institute for Science and Engineering)
collaborative researchers:TAKANISHI, Atsuo Professor
医師など医療従事者の訓練に用いる患者シミュレータに関する技術.アクチュエータによって1台のシミュレータでさまざまな患者を再現することや,センサによって手技を計測し評価することが可能.