ロボットアーム、ハンド用の小型力覚・トルクセンサ
2015-1215-02

- 研究者名
-
研究者情報 シュミッツ アレクサンダー 客員上級研究員
- 所属
-
理工学術院 大学院創造理工学研究科
- キーワード
-
背景
◆次世代ロボットには、コンパクトな力覚センサが重要
◆デジタル化され、ケーブルの量を減らすことができる
◆別のデジタル基板やアンプ基板が不要
◆デジタル化され、ケーブルの量を減らすことができる
◆別のデジタル基板やアンプ基板が不要
シーズ概要
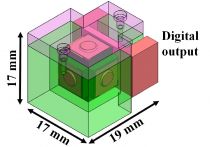
◆新たな静電容量型6軸力覚・トルクセンサ
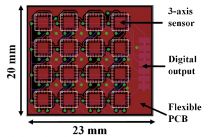
◆分散触覚センシング用の新たな3軸力覚センサ
◆分散触覚センシング用の新たな3軸力覚センサ
優位性
◆6軸力覚・トルクセンサのサイズ: 19x17x17 mm
◆分散触覚センサ:20x23x3 mm 16x3軸力覚・トルクの測定、汎用的で柔軟
◆デジタル出力、高い信号対雑音比
◆温度補正
◆分散触覚センサ:20x23x3 mm 16x3軸力覚・トルクの測定、汎用的で柔軟
◆デジタル出力、高い信号対雑音比
◆温度補正
応用・展開
◆6軸センサ : マニピュレータ用の力覚・トルクフィードバック
バリ取り、研磨、研削 (ロボットは一定の力覚を使用する必要がある場合)、ロボット部品挿入、機械および電気部品アセンブリの検証等
◆3軸センサ : ロボットアーム用の柔軟かつ高感度のスキンカバー
バリ取り、研磨、研削 (ロボットは一定の力覚を使用する必要がある場合)、ロボット部品挿入、機械および電気部品アセンブリの検証等
◆3軸センサ : ロボットアーム用の柔軟かつ高感度のスキンカバー
資料
他のシーズ
-
 可変剛性関節を備えたロボットアーム
可変剛性関節を備えたロボットアーム -
 可変トルクリミットアクチュエータの制御システム
可変トルクリミットアクチュエータの制御システム -
停電時の安全性を持つ可変トルクリミッタ
-
能動的接触力調整エンドエフェクタ
-
クラッチ機構を用いた動的重力補償ロボットシステム
掲載日:
2015/12/15