Development of Subliminal Persuasion System for Laparoscopic Training
2015-1215-04

- researcher's name
-
about researcher TAKANISHI, Atsuo Professor
- affiliation
-
Faculty of Science and Engineering
- research field
-
Intelligent mechanics/Mechanical systems,Surgical dentistry
- keyword
-
background
● Special trainings and education are needed for laparoscopic surgery
● Current training for laparoscopy focuses only on the enhancement of manual skill and does not give advice on improving trainees’ posture
● The workload of laparoscopic training is high, we present a method, named subliminal persuasion that gives the trainee real time feedback to correct posture and help in reducing fatigue and improving performances without adding extra workload
● Current training for laparoscopy focuses only on the enhancement of manual skill and does not give advice on improving trainees’ posture
● The workload of laparoscopic training is high, we present a method, named subliminal persuasion that gives the trainee real time feedback to correct posture and help in reducing fatigue and improving performances without adding extra workload
summary
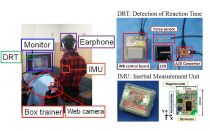
● Experimental setup and materials(fig.1)
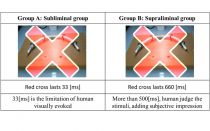
● Different types of feedback(fig.2)
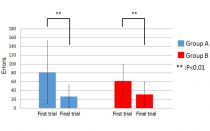
● The different between first trial and last trial(fig.3)
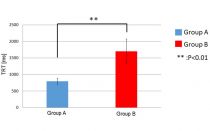
● Workload of each group during laparoscopic training(fig.4)
● Different types of feedback(fig.2)
● The different between first trial and last trial(fig.3)
● Workload of each group during laparoscopic training(fig.4)
predominance
● During laparoscopic train, not only the surgical performance could improve, but also the posture could be corrected
● Subliminal persuasion system doesn’t give trainee much extra workload
● Subliminal persuasion system doesn’t give trainee much extra workload
application/development
● Surgical training
material
collaborative researchers
SESSA, Salvatore Part-time Lecturer (retired)
same researcher's seeds
-
 Development of a Wearable Motion Capture System for Balance Evaluation of Older Adults
Development of a Wearable Motion Capture System for Balance Evaluation of Older Adults -
Human-Robot Laughter Interaction
-
Human-Robot Musical Interaction
posted:
2015/12/15