Small Sized Force / Torque Sensors for Robotic Arms and Hands
2015-1215-02

- researcher's name
-
about researcher SCHMITZ, Alexander Guest Senior Researcher
- affiliation
-
Faculty of Science and Engineering Graduate School of Creative Science and Engineering
- keyword
-
background
● Next generation robots need compact force sensors
● Sensors with digital output reduces necessary wiring
● No additional components for amplification and digitization required
● Sensors with digital output reduces necessary wiring
● No additional components for amplification and digitization required
summary
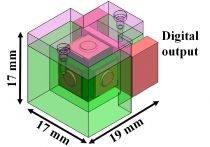
● Novel 6-axis F/T sensor based on capacitive ensing
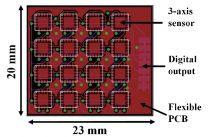
● Novel 3-axis force sensors for distributed tactile sensing
● Novel 3-axis force sensors for distributed tactile sensing
predominance
● 6-axis sensor: 19x17x17 mm.
● Distributed sensor: 16 * 3-axis F/T in 20x23x3 mm.
Flexible and soft. Only 3% hysteresis.
● Digital output. High signal-to-noise ratio.
● Temperature drift compensation
● Distributed sensor: 16 * 3-axis F/T in 20x23x3 mm.
Flexible and soft. Only 3% hysteresis.
● Digital output. High signal-to-noise ratio.
● Temperature drift compensation
application/development
● 6-axis sensor: Force/torque feedback for manipulators.
Deburring, polishing, grinding (where robot is required to apply a constant force).
Robotic part insertion. And many more…
● 3-axis sensor: Soft and sensitive cover for robotic arms.
Deburring, polishing, grinding (where robot is required to apply a constant force).
Robotic part insertion. And many more…
● 3-axis sensor: Soft and sensitive cover for robotic arms.
material
same researcher's seeds
-
 A Robot Arm with Novel, Intrinsically Safe Joints
A Robot Arm with Novel, Intrinsically Safe Joints
posted:
2015/12/15