Robotic System for Breast Cancer Diagnosis and Treatment
2015-0303-01

- researcher's name
-
about researcher FUJIE, Masakatsu Professor (retired)
- affiliation
-
Faculty of Science and Engineering School of Creative Science and Engineering
- keyword
-
predominance
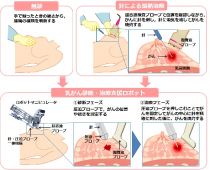
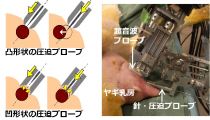
・Measuring a location and stiffness of a cancer as palpation
・Inserting a needle for treatment accurately into a cancer by compression using palpation probe to stabilize the cancer
background
・Increasing incidence rate of breast cancer in Japanese women
・Desiring minimally-invasive and accurate diagnostic and treatment techniques
summary
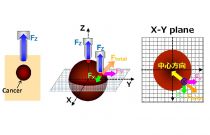
・Detection of a center position of cancer using palpation probe
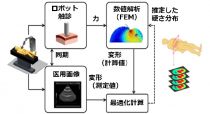
・Estimation of tissue stiffness using robot and medical image
・Method to reduce displacement of cancer during needle insertion by pre-loading the tissue
application/development
・Supporting technique for breast cancer diagnosis and treatment
・Application to diagnosis and treatment of cancer in other parts of the body
material
same researcher's seeds
-
 Walk Rehabilitation Support Robot for Symmetrizing Stance Phase
Walk Rehabilitation Support Robot for Symmetrizing Stance Phase -
Robot of Gait Training Assisted by Physical Therapist
-
Haptic Interface for Navigation of the Visually Impaired
-
False Step Prediction System and False Step Prevention System
-
Robot Control using Muscle Bulge Movement
-
Visual Assistance System for Endoscopic Surgery
-
Development of Support System for RFA
-
Evaluation Method for Static Stretching
posted:
2015/03/03