Robot Control using Muscle Bulge Movement
2015-0302-05

- researcher's name
-
about researcher FUJIE, Masakatsu Professor (retired)
- affiliation
-
Faculty of Science and Engineering School of Creative Science and Engineering
- keyword
-
predominance
・Nobel robot control method using a new bio signal
・Estimate the operation quantity using muscle bulge movement
background
・Robot control using unstable EMG signal
・Estimate the operation quantity using EMG is difficult
・Necessary to reflect the operating intention
summary
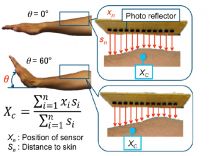
・Method to measure and calculate muscle bulge movement on the forearm skin
・Linear relationship between wrist angle and muscle bulge movement
application/development
・Novel input signal for artificial limb control
・Application for controlling the exoskeleton and the robot arm
material

same researcher's seeds
-
 Walk Rehabilitation Support Robot for Symmetrizing Stance Phase
Walk Rehabilitation Support Robot for Symmetrizing Stance Phase -
Robot of Gait Training Assisted by Physical Therapist
-
Haptic Interface for Navigation of the Visually Impaired
-
False Step Prediction System and False Step Prevention System
-
Visual Assistance System for Endoscopic Surgery
-
Development of Support System for RFA
-
Robotic System for Breast Cancer Diagnosis and Treatment
-
Evaluation Method for Static Stretching
posted:
2015/03/02